
Рабочий прототип БК с использованием LCD WH2004A I2C.
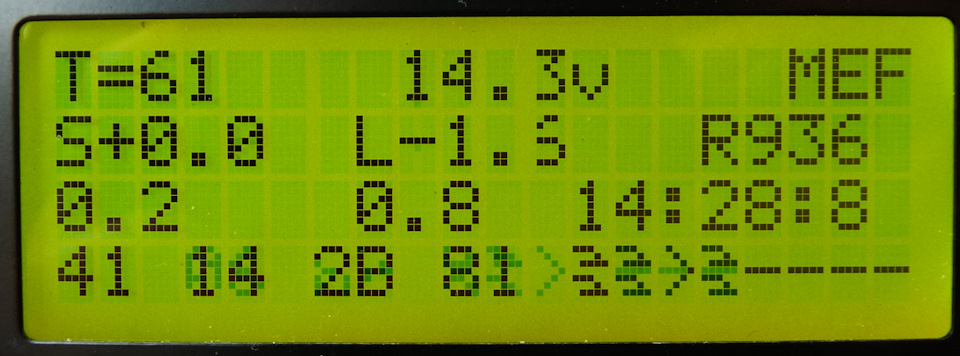
Для отображения (на данном этапе) используется одна страница:
— температура (T), Напряжение (v),
— краткосрочная топливная коррекция (STFT), долгосрочная топливная коррекция (LTFT), Обороты (R ).
— напряжение первого и второго зондов, время.
— принимаемая строка данных
Связь обеспечивается по BT через ELM327 BT с использованием OBD2 команд (протокола).
Компоненты:
— Arduino Uno;
— LCD WH2004A I2C
— модуль времени DS3231;
— модуль BT HC-05 (для связи с ELM327 BT);
— модуль SD-card;
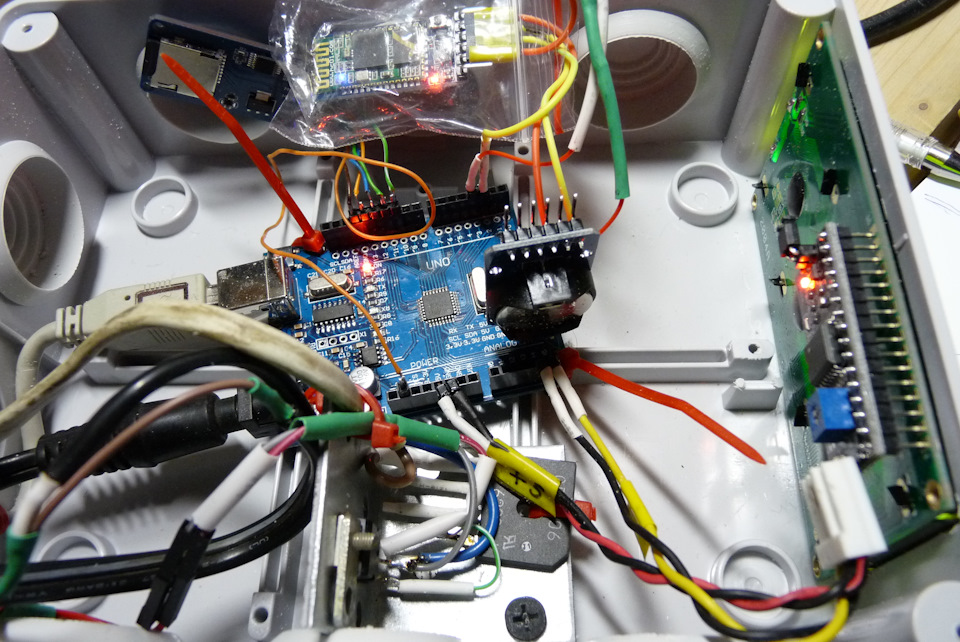
Основная особенность — наличие модуля SD-card. Т.е. это полноценный регистратор данных (кроме GPS).
В этом плане (регистрация) конкуренцию может составить только Torque (на сколько знаю).
Примерно за 25 долларов мы сможем сделать бортовой компьютер, умеющий считать расход топлива, показывать температуру охлаждающей жидкости, скорость авто, расстояние поездки, потраченный за поездку бензин, обороты двигателя, давление во впускном коллекторе, температуру впускного коллектора, УОЗ, коррекции топлива, вольтаж датчиков кислорода, нагрузку двигателя и многое другое. Сброс ошибок доступен в режиме «recovery» (как зайти написано ниже). Общий цикл работы с запросом всех данных из эбу происходит примерно раз в 750 мс. (при условии паузы между запросами в 65 мс, так по умолчанию)








Список требуемых деталей для сборки БК
1) Arduino Uno R3 — 1 шт.

2) LCD2004 жк-модуль

3) Модуль Bluetooth HC-05

4) OBD ELM327 Bluetooth сканер

5) Резистор 10 кОм подстроечный, бипер для звука, 2 кнопки для смены экранов, провода для соединений, корпус
Настройка блютуз модуля HC-05 для работы
Подпаиваем провода к пинам блютуза: (картинку с выходами смотреть в описании требуемых деталей)
- 1 — это TX
- 2 — это RX
- 12 — это 3.3V
- 13 — это GND
- 34 — на этот вход тоже кидаем 3,3 V (нужен для перевода модуля в режим настройки с помощью AT команд).
Подключаем блютуз модуль к ардуине для его настройки
- 1 — TX модуля в 6 пин ардуины. (внимание будет TX в TX это не ошибка!)
- 2 — RX модуля в 7 пин ардуины. (аналогично не ошибка!)
- 12 — и 34 пин к 3,3V ардуины.
- 13 — GND ардуины.

- 1 — TX модуля в 6 пин ардуины. (внимание будет TX в TX это не ошибка!)
- 2 — RX модуля в 7 пин ардуины. (аналогично не ошибка!)
- 12 — и 34 пин к 3,3V ардуины.
- 13 — GND ардуины.
Открываем Aduino IDE 1.0.6 (использовал эту версию) и заливаем скетч через USB порт в плату.
#include
SoftwareSerial BTSerial(6, 7); // TX | RX
void setup()
<
Serial.begin(9600);
Serial.println(«Enter AT commands:»);
BTSerial.begin(38400);
>
void loop()
<
if (BTSerial.available())
Serial.write(BTSerial.read());
if (Serial.available())
BTSerial.write(Serial.read());
>
После успешной загрузки скетча открываем: Сервис->Монитор порта. Далее снизу ставим скорость 9600 бод и NL+CR вместе.
Далее вводим команды по одной и нажимаем [Послать]. После каждого ввода должен быть ответ ok.
AT // (возможно 1 раз вылетит Error, не пугайтесь… это нормально, повторите опять)
AT+NAME=Car //Присваиваем имя модулю Car
AT+ROLE=1 // Переводим модуль в режим Мастер
AT+PSWD=1234 // Ставим пароль 1234 как на OBD ELM327
AT+BIND=AABB,CC,112233 //Прописываем Mac адрес OBD ELM327.
AT+CMODE=1 // Подключение модуля с фиксированным адресом
Заметьте, что mac-адрес вида: «AA:BB:CC:11:22:33» вводится как «AABB,CC,112233». MAC- адрес своего модуля ELM327 можете посмотреть, подключившись для начала на него со своего мобильника. (Стандартные пароли обычно: 1234, 6789, 0000).
Всё, настройка модуля Bluetooth закончена.
Теперь нужно собрать схему Arduino + блютуз + LCD-экран

1.Начнем с подключения HC-05 Bluetooth модуля.
- 1 — TX модуля засовываем в 7 Pin (Rx) арудины (именно TX в RX, не так как ранее);
- 2 — RX модуля засовываем в 8 Pin (Tx) арудины;
- 12 — Pin (3,3V) модуля в Pin 3,3V ардуины;
- 13 — Pin (Gnd) в Gnd арудуины;
- 34 — Pin мы никуда не подключаем (заизолируйте или отпаяйте).
2. Подключаем монитор LCD.
- VSS экрана к GND ардуины;
- VDD экрана к 5V ардуины;
- V0 экрана к центральному выходу резистора;
- RS экрана к 12 пину ардуины;
- RW экрана к GND ардуины;
- E экрана к 11 пину ардуины;
- DB4 экрана к 5 пину ардуины;
- DB5 экрана к 4 пину ардуины;
- DB6 экрана к 3 пину ардуины;
- DB7 экрана к 2 пину ардуины;
- A — к 5V ардуины;
- K — GND ардуины.
Одну из оставшихся ног потенциометра пустить на GND ардуины.
Переменный резистор на 10кОм нужен, чтобы управлять контрастностью монитора, так что если при первом включении вы включите и ничего не увидите, попробуйте отрегулировать контрастность шрифта поворотом резистора.
3. Подключаем дополнительную кнопку для переключения экранов с данными.
[1 кнопка]: один конец от нормально-открытой кнопки подключаем в GND ардуино, а второй конец в пин 10.
[2 кнопка]: GND + пин 9.
Бипер для звуковых предупреждений подключить по следующей схеме «+» к пину 13, а минус к GND ардуино.
Заливаем скетч в Arduino с помощью Aduino IDE 1.0.6 (использовал эту версию).
Единственное, в скетче присутствуют переменные, которую нужно подправить.
Нужно будет обязательно учесть три переменных:
1) ED=1.998 Например объем двигателя в литрах 1.398;
2) VE_correct=1.0; Корректировка объёмного КПД ДВС по таблице: (если расход реально меньше — то уменьшаем значение в процентном соотношении). Если не хотите калибровать добейтесь чтобы при прогретом двигателе мгновенный расход в л/час был в районе половины обьема двигателя;
3) tcorrect=1.014 (калибровка времени).
4) delay_var=65 Время паузы между запросами в ЭБУ, в дастере например все работает уже на 65 мс, а в старом chrysler cirrus надо аж 235 мс ставить.
5)speed_korrect_val=1; Корректировка скорости машины, смотреть по GPS/
Возможно, Arduino будет не точно считать время с помощью комманды millis()… Тут только вручную корректировать значение. На экране «технологический 2» будет указаны секунды: например, time_start: 23. Сравните значение с реальным. Для примера засеките 10 минут, когда значение time_start будет, например, равно 23. И выйдет, что через 600 секунд реально покажет 605. Итого 623-605=18 секунд отставание в ардуинке. То есть поправочный коэффициент tcorrect будет равен 623/605=1,02975.
Управление
[Кнопка 1], [кнопка 2] — листать экран вперед назад.
При включении при надписи «Connecting»… держать [кнопку 1] вход в режим показывания технологических экранов и параметров отдаваемых ЭБУ в 16-чном формате. Если будете включать БК не в машине то нужно отключить функцию опроса блютуз, надо продолжать держать две кнопки при надписи «Recovery»… до появлении надписи «All off»… а то экран будет все время пустой.
[Кнопка 1] + [кнопка 2]: 4 секунды — Сброс журнала общего пробега и потраченного бензина на втором экране, также это сброс ошибок на экране информации об ошибках.
Скетч:
(по умолчанию настройки в скетче на Рено Дастер 2.0)
Все, идем в машину, вставляем ELM327 в порт, ардуину в зарядку для авто и проверяем.
UPD 06.02.15: Обновлен расчет MAF по изменяемой объемной эффективности VE согласно графика при которое VE зависит от оборотов двигателя.
UPD 05.03.15: Переделан режим записи в EEPROM данных журнала пробега и расхода. Теперь данные записывает при низкой скорости от 1 до 9 км/час раз в 30 секунд, а при заведенном двигателе но скорости 0 км/час, раз в 10 секунд.
UPD 04.03.15: Обновлен режим «торможение двигателем», теперь срабатывает по нагрузке двигателя, работает корректнее чем по Fuel System Status. Расход топлива теперь изменяется по топливным коррекциям Long и Short. Также добавлено множество других правок.
UPD 26.02.15: Добавлен звуковой бипер. Если температура двигателя выше 102 градусов то вывести предупреждение о высокой температуре на экран и прогудеть бипером, так же будет звук при появлении ДжекиЧана
UPD 25.02.15: Добавлены экраны датчиков кислорода B1S1, B1S2.
UPD 24.02.15: При включении БК проверяет есть ли ошибки двигателя. При их наличии пишет сколько ошибок в двигателе, и показывает код ошибки. Сброс доступен в режиме рекавери.
UPD 23.02.15: Добавлен экран топливной коррекции.
UPD 22.02.15: Добавлен экран очистки ошибок в режиме recovery. Для очистки ошибок зажать обе кнопки на 4 секунды.
UPD 19.02.15: Добавил журнал общего пробега и потраченного бензина. Сброс — обе кнопки подержать 3 секунды.
Про параметр Fuel system status:
Для него нормальные показания это Closed loop (2).
Но иногда можно увидеть там open loop (1). Это значение можно увидеть в трех случаях:
1) автомобиль холодный и датчик кислорода еще не прогрелся
2) сильное нажатие на педаль газа и прекращение коррекции по ДК с целью достижения макс. мощности
3) прекращение подачи топлива при отпускании педали газа на скорости на передаче.
Про Обьемный КПД двигателя
Объёмный КПД двигателя внутреннего сгорания отражает эффективность всасывания в цилиндр и выпуска из цилиндра рабочей среды (то есть, топливо-воздушной смеси или выхлопных газов). Говоря более строго, объёмный КПД — это отношение (или процентное соотношение) количества рабочей среды, фактически всасываемой в цилиндр, к объёму самого цилиндра (при неизменных условиях). Поэтому те двигатели, которые могут создавать давления на входах в трубопроводы выше давления окружающей среды, могут иметь объёмный КПД больший 100 %.
VE изменяется в зависимости от оборотов, и дроссельной заслонке согласно найденной информации и в машинах для него вообще есть настоящие 3D таблицы:

Нашел график изменения в гугле и попытался воспроизвести хотя бы грубо его изменение.

Вот такой вот график получился! =))) ( кто сможет точнее дать данные для более точного графика буду рад, информации особо не нашел сколько не искал.)
Когда-то давно, примерно в середине 90-х, во время появления процессора Pentium Pro, один из основателей компании Intel Гордон Мур заметил, что: «Если бы автомобилестроение развивалось со скоростью эволюции полупроводниковой промышленности, то сегодня Роллс-Ройс мог бы проехать полмиллиона миль на одном галлоне бензина, и было бы дешевле его выбросить, чем платить за парковку». Но, пожалуй, уже сегодня автомобилестроение совершает гигантский шаг развития в направлении, как кардинальной смены типа топлива, так и технологий управления автомобилем. Практически недавно представлены коммерческие электромобили и авто на водородном топливе, а автопилот становится желаемым компонентом электронной «начинки» транспортного средства. В большинстве своем, как раз стремительный рывок автопрома обусловлен появлением надежных и безопасных решений на основе умной электроники для автомобильных бортовых систем управления. Но, где же в повседневной жизни Интернет в автомобиле, где же технологии Интернета вещей (IoT), а также многим известная концепция подключенного к сети автомобиля (Connected Car)?

The Rolls-Royce 103EX. Rolls-Royce unveils driverless, electric concept car, complete with silk love seat – The Telegraph.
На самом деле, все вышеперечисленные технологии уже существуют и используются, однако, только в достаточно обособленных решениях. Виною тому, строгие требования к обеспечению безопасности, которые непременно должны быть реализованы при запуске любой новой технологии или решения на транспорте. Поэтому, нельзя сказать, что, садясь в автомобиль со смартфоном, можно автоматически получить решение IoT или Connected Car. В большинстве стран, и это очень логично, существует запрет на использование смартфона или других гаджетов за рулем, а если говорить о голосовых ассистентах, то в большинстве случаев они сейчас раздражают и отвлекают, как водителя, так и пассажиров. В свою очередь, медиа-центр, дополнительные видеоэкраны и отличная акустика, конечно, являются очень привлекательными составляющими современного автомобиля. Но хочется поймать себя на слове, и отметить, что как хорошо приглушить музыку и просто смотреть в окошко на проносящиеся мимо улицы или природу. Конечно, есть пробки, но в этой публикации ставится цель отметить не сколько этическую составляющую или рассмотреть проблемы информационного перенасыщения участников дорожного движения, а рассмотреть те «невидимые» компоненты технологий IoT, которые уже используются в транспортных средствах и доступны для широкого применения.
На сегодня, интересным и очень перспективным решением автомобильного IoT, является платформа Open Connected Car компании Mojio. Эта платформа с открытым интерфейсом (API) предоставляет облачный сервис для «подключенных» авто и уже доступны коммерческие предложения. Например, телекоммуникационный гигант Т-Mobile, на базе этой платформы, предоставляет сервис SyncUP DRIVE. Это программно-аппаратное решение на базе портативного устройства, подключаемого к автомобилю через разъем диагностики OBD-II, и соответствующее мобильное приложение. Благодаря такому подходу можно эффективно выполнять непрерывный мониторинг параметров работы своего автомобиля и в любой момент времени получать его текущее месторасположение. Приложение может рассказать о стилях вождения, предупредить о профилактическом обслуживании, а также уведомить владельца о проблемах с транспортным средством. Кроме того, SyncUP DRIVE разворачивает в автомобиле точку доступа Wi-Fi, используя доступ по высокоскоростному протоколу мобильного стандарта LTE.

The Open Connected Car Platform – Mojio
Для подключения к автомобилю используется стандартный диагностический разъем OBD-II. Большинство серийных автомобилей, выпущенных после 1996 года, уже оснащены таким разъемом. Хотя такой разъем диагностики и стандартизирован, но в нем поддерживаются сразу несколько протоколов различных систем управления двигателем (физически используются разные контакты на разъеме), которые должен «знать» коммуникационный модуль IoT. Соответственно в разных марках автомобилей могут быть разные внутренние шины получения данных диагностики с бока управления двигателя (ECU — Electronic control unit). Для работы с сервисом SyncUP DRIVE предлагается решение на основе модуля VM6200S компании ZTEWelink.
Модуль VM6200S поддерживает подключение по мобильному протоколу LTE, содержит интегрированный 3-х осевой датчик ускорений и 3-х осевой гироскоп, приемник GPS-сигналов, чип OBD-II, с поддержкой протоколов ISO 15765-4 (CAN), ISO 14230-4 KWP (Keyword Protocol 2000), ISO 9141-2 (Chrysler, Euro, and Asian automobiles), SAE J1850 PWM (Ford vehicles), SAE J1850 VPW (GM vehicles). Таким образом, модуль позволяет развернуть точку доступа Wi-Fi 802.11 b/g/n/, регистрировать события во время движения, выполнять диагностику работы двигателя, оценивать экономичность расхода топлива и т.п. А поскольку партнерами Mojio являются проекты Amazon Alexa, сервис IFTTT и другие, то для разработчиков и интеграторов решений открываются все перспективы вплоть до создания социального IoT на основе «подключенного» автомобиля, как составляющей такой инфраструктуры.

VM6200S4G OBD Device – ZTEWelink Corporation
Но не только SyncUP DRIVE сейчас представлена на рынке, например, многие компании предоставляют нечто подобное. Конечно, недавно появившийся Samsung Connect auto device – одно из таких интересных предложений, превращающих автомобиль в подключенное устройство. Решение от Samsung аналогичным образом использует мобильную сеть поколения 4G LTE и разворачивает внутри автомобиля точку доступа Wi-Fi: 802.11 a/b/g/n. Connect auto device поддерживает подключение Bluetooth v4.1, содержит GPS-приемник, датчик ускорений, гироскоп и базируется на 4-х ядерном процессоре с частотой 1.2GHz и операционной системе Tizen. Следует отметить, что корейский электронный гигант Samsung говорит о защищенности системы за счет использования Samsung Knox – мобильного решения с защитой уровня предприятия. Фактически Samsung Knox – это программно-аппаратное решение для усиления защиты операционной системы Android.

Samsung Connect auto
Таким образом, информация, полученная по средствам считывания данных OBD-II, текущие координаты месторасположения с GPS-приемника и параметры динамики движения автомобиля, полученные с гиро-сенсоров, на текущий момент времени и де-факто, стали основой для превращения любого транспортного средства в устройство IoT. Дальше можно рассмотреть сценарии использования агрегированной информации, полученной от автомобилей, применять различные методики обработки Big Data, и при этом не нужно забывать о перспективах объединения таких данных с информацией от инфраструктуры «умных» дорог. Но прежде чем заняться обработкой данных, нужно их сначала получить, поэтому в этой публикации уделим основное внимание аппаратной составляющей реализации сценариев работы на уровне диагностического разъема OBD-II.
Так или иначе, но все ранее рассмотренные решения – это более совершенные промышленные изделия, по сравнению с обычным устройством считывания кодов диагностики на базе микросхемы ELM327 канадской компании Elm Electronics. ELM327 – это универсальный преобразователь протоколов, используемых в диагностических шинах автомобилей, в последовательный протокол типа RS-232.

Структурная схема микросхемы ELM327 v2.2 – Elm Electronics
Взаимодействие с ELM327 осуществляется стандартными AT-командами, поддерживаемыми микросхемой. Нужно просто организовать обмен текстовыми сообщениями по, уже ставшему классикой, протоколу RS-232 (или правильнее UART, т.к. речь идет только о потоке данных, а не уровнях сигнала). А само физическое соединение низкого уровня по USB, Bluetooth или Wi-Fi просто реализуется, с применением микросхем преобразования последовательного протокола UART. Получается, чтобы превратить автомобиль в устройство IoT вполне достаточно, не забыв о согласовании уровней напряжений, подключить микросхему ELM327 к диагностическому разъему OBD-II и на выходе этой микросхемы, например, поставить преобразователь последовательного интерфейса в Bluetooth или Wi-Fi. Затем, можно со своего смартфона «считывать» диагностику автомобиля. Впрочем, таких готовых модулей или блоков на рынке предостаточно. А их цена на AliExpress колеблется в пределах US $2.50 – US $10. Хотя модуль и не должен потреблять много энергии, но будет очень удобно, если на нем уже присутствует кнопка отключения питания. Кстати, с точки зрения защищенности – это тоже не плохо.

Mini ELM327 Bluetooth OBD-II Car Diagnostic Adaptor V1.5
Теперь можно подключить стандартный модуль Mini ELM327 Bluetooth OBD-II V1.5 (интересно, что во многих источниках советуют использовать модули со старой прошивкой версии 1.5, а не новые с версией 2.2, т.е. как аргумент высказывается более стабильная работа модуля на старой прошивке и поддержка большего количества авто, но это очень субъективно) и поэкспериментировать с подключением смартфона к выбранному модулю, например, для платформы Android можно использовать одну из самых популярных программ диагностики Torque Lite (OBD2 & Car) или Torque Pro (OBD 2 & Car), а также что-нибудь попроще или использовать свои наработки.

Работа приложения Torque Pro под Android.
Кстати, хочется отметить, очень удобный сервис MockUPhone с бесплатными mock-up современных гаджетов, который очень пригодился, для подготовки скриншота работы программы Torque. Но это небольшое отступление от темы публикации. Нужно заметить, что в большинстве случаев, разъем OBD-II, к которому подключается модуль диагностики, находится под рулевой колонкой автомобиля.

Getting Started with OBD-II – SparkFun Electronics
Понятно, что уже готовых решений существует множество. Но если речь идет о разработке сервиса на основе IoT или более конкретно – реализуется концепция Connected Car, то достаточно удобно использовать эмулятор бортовой информационной сети автомобиля, чтобы не бегать каждый раз к автомобилю. Например, Mojio для работы со своим API предлагает онлайн симулятор автомобиля, а на примере работы с облачным сервисом IBM Watson IoT Platform в статье: «Sending Vehicle Data to the IBM Watson IoT Platform – IBM developerWorks Recipes» предлагается для отправки в облако данных с транспортного средства использовать мобильное приложение, например, «IBM IoT for Automotive — OBDII Fleet Management App for Android», которое взаимодействует с разворачиваемым облачным сервисом «IBM IoT for Automotive (Bluemix) — Fleet Management Starter Application», но если не отвлекаться на эти проекты можно использовать просто эмулятор данных: «Car Simulator». Правда, все эти решения, в основном, эмулируют уже как бы полученные данные, а нам интересен именно эмулятор бортовой информационной сети. Наиболее известное такое решение – это ECUsim 2000, стоимость которого начинается с отметки US $200 и зависит от количества поддерживаемых эмулируемых протоколов.
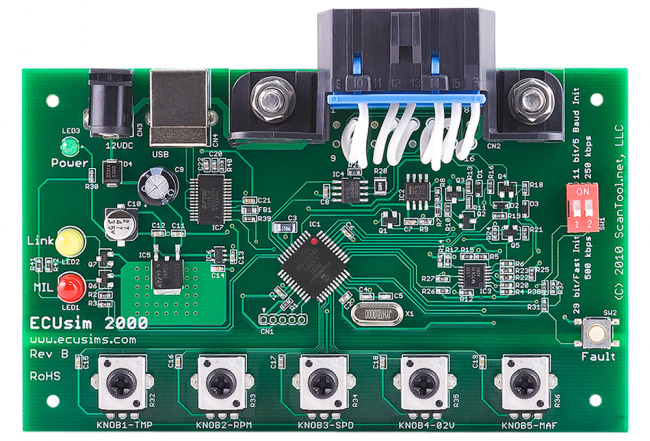
ECUsim 2000 OBD Simulator – ScanTool
Конечно, профессиональный эмулятор не заменишь, но энтузиастов и гиков вполне может заинтересовать самостоятельная реализация менее сложного проекта на Arduino или Raspberry Pi. Например, можно ограничиться только наиболее распространенным интерфейсом CAN (Controller Area Network). В свое время, стандарт CAN, предложенный компанией Bosch, совершил заметный прогресс в разработке систем для автомобильной электроники. Если автомобиль в сети Интернет появился только недавно, то концепция сети внутри автомобиля существует уже с середины 80-х. Идея очень проста, и как Ethernet совершил прорыв в компьютерных сетях, так и CAN стал основой надежных коммуникаций внутри автомобиля.
An Arduino Based CAN Bus Network – Henry’s Bench
Раньше в автомобиле, как правило, к центральному блоку управления двигателем «стекались» шины и провода различных подключенных модулей и устройств. Последовательная двухпроводная шина CAN позволила реализовывать уже независимые интеллектуальные модули, например, центральный блок управления стал просто одним из таких модулей, которые «общаются» друг с другом фактически по сетевому протоколу. При этом значительно уменьшается количество проводки внутри автомобиля.
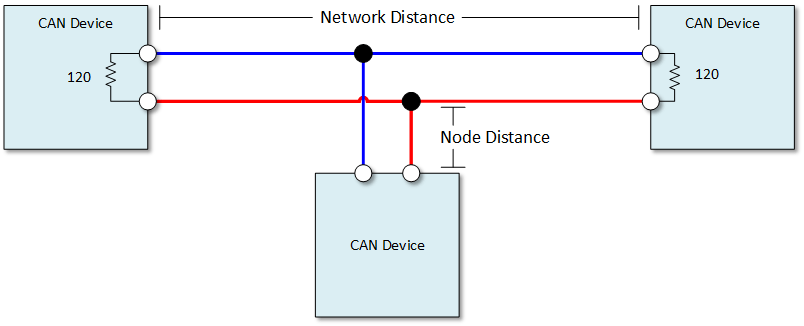
В отличие от Ethernet, сеть CAN значительнее надежнее, что обусловило ее применение не только в автопроме, но и в системах промышленной автоматики, решениях умного дома и т.п. На физическом уровне в CAN используется двухпроводная линия, CAN Lo и CAN Hi, которые побитно передают данные, упакованные в пакет. На концах шины присутствуют согласующие сопротивления по 120 Ом, а также для подавления помех следует использовать скрутку проводов. Скорость передачи данных может достигать 1 Мбит/с.
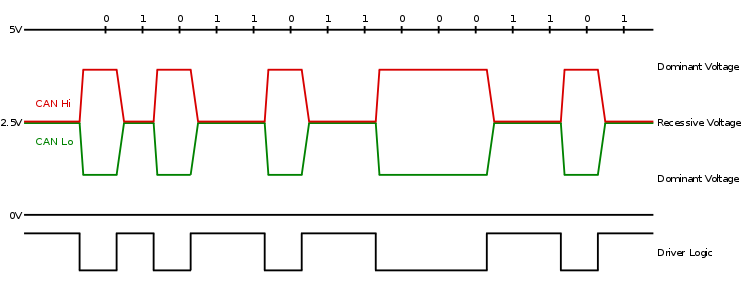
A Controller Area Network (CAN bus)
Передача данных в CAN bus чем-то напоминает модель «издатель-подписчик», где каждое устройство на шине имеет уникальный идентификатор и, когда передает данные одно устройство, то все остальные слушают, и принимают решение на основе этого идентификатора – нужны ли конкретно им эти данные для приема и обработки или нет. В общем, протокол достаточно сложен, но для микроконтроллера или микропроцессора вряд ли придется писать реализацию CAN, а также думать об особенностях физической среды передачи данных. Для решения этих задач уже есть готовые аппаратные контроллеры шины, а для согласования уровней, зачастую применяются интегральные преобразователи. Например, контроллер MCP2515 с интерфейсом SPI и трансивер (согласовательная микросхема уровней) MCP2551. Как раз на базе этих микросхем и предложен проект Arduino OBD2 Simulator, опубликованный на площадке Instructable. Для его реализации потребуется лишь плата Arduino UNO и CAN-BUS Shield, например, компании Seeed Technology.

Эксперименты с применением Arduino OBD2 Simulator
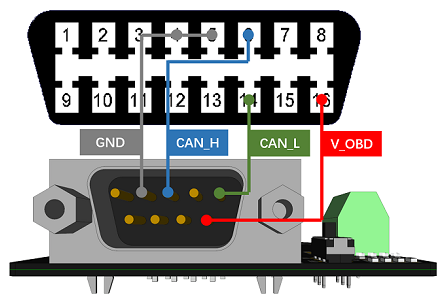
В принципе, для разработки эмулятора данных OBD-II, не помешает наличие блока питания DC на 12V для модуля ELM327, а также разъем OBD-II. Впрочем, no-name преобразователь DC-DC-USB-TO-12V вполне может решить проблему, т.к. несколько блоков питания на 5V, пожалуй, будут под рукой у любого разработчика для Интернета вещей и не только. Для подключения к OBD-II потребуется два информационных провода CAN_H и CAN_L, а также наличие питания 12 V, но как было замечено ранее, 12 V нужно только для обеспечения работоспособности для модуля ELM327.
CAN-BUS Shield V1.2 — Seeed Development Limited Wiki
На плате расширения CAN-BUS Shield очень удобно использовать не разъем D-SUB, а просто клеммник на два контакта (CAN_H, CAN_L). С точки зрения разработки программного кода, следует отметить, что прототип энтузиасты выложили на GitHub. Сейчас платы от Seeed изменились, да и в любом случае для контроллера MCP2515 лучше использовать новые драйверы все той-же Seeed-Studio. Конечно, оригинальную программу нужно будет немного доработать под новые драйверы, но это дело на пару минут.
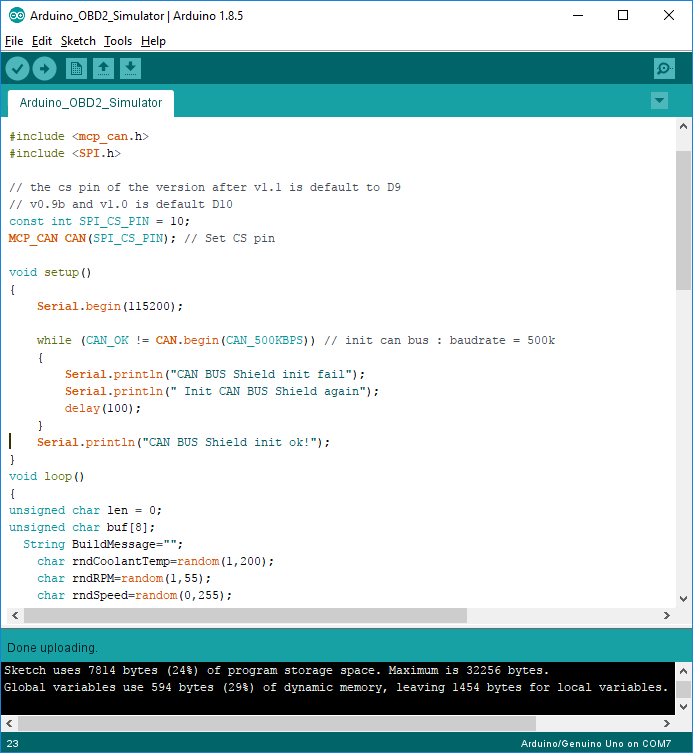
Работа с CAN-BUS в среде Arduino IDE на основе low cost OBD2 ECU Simulator
Однако, рассмотренный пример очень примитивен, так как все параметры, отправляемые по протоколу OBD-II, просто генерируются случайным образом, нет связи параметров работы двигателя между собой и т.д. Как продолжение проекта очевидным является разработка приложения, похожего на Freematics OBD-II Emulator GUI. Это графическая оболочка с открытым исходным кодом, которая используется в аппаратном решении Freematics OBD-II Emulator.

Freematics OBD-II Emulator GUI – Freematics
Таким образом, собрав на базе Arduino модуль, позволяющий работать с CAN, вполне можно создать эмулятор OBD-II, так как протокол диагностики хорошо описан и его несложно реализовать. Следует отметить, что реализация взаимодействия микроконтроллера и бортовой шины CAN – это совсем другая задача и нужно понимать, что внутренние высокоуровневые протоколы этой шины не документируются автопроизводителями, да и с другой стороны – не следует внедрятся во внутреннее устройство автомобильной электроники, чтобы не коим образом не снизить безопасность эксплуатации транспортных средств. Если говорить о CAN в общем, то для разработки своих устройств на базе этой шины вполне можно использовать высокоуровневый открытый протокол CANopen.
Остается дело за малым – немного свободного времени и в удовольствие выполнять разработку своего кода. Правда, где же это время найти в конце года? Но будем оптимистами. А вот, если говорить о применении такого эмулятора OBD-II, то самое прямое направление – это разработка уже своего модуля для диагностического разъема. Например, за отправную точку можно взять открытый проект Carloop, который нацелен на создание модуля подключения автомобиля к облаку с использованием технологий 3G, Wi-Fi или Bluetooth.
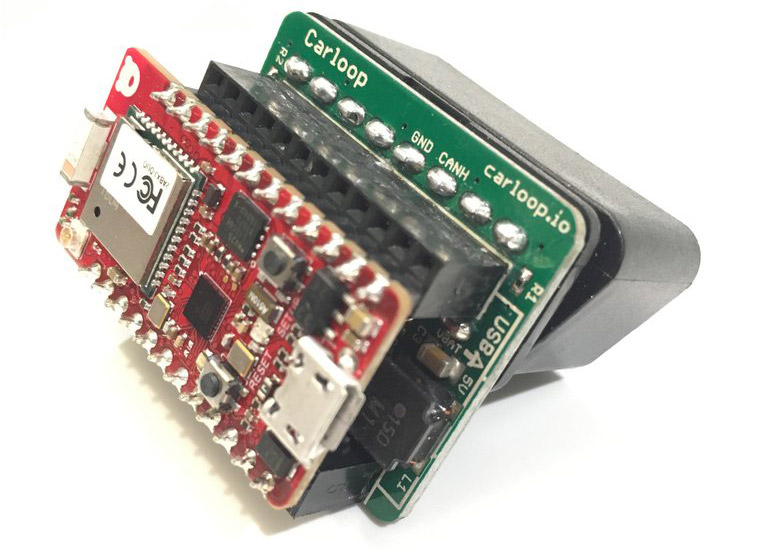
Carloop Bluetooth
Проект Carloop основывается на использовании плат: Particle Photon (на базе Wi-Fi модуля Cypress BCM43362, который поддерживает стандарт 802.11b/g/n; контроллера семейства ARM Cortex M3 – STM32F205 на частоте 120Mhz; 1MB флеш-памяти; 128KB оперативной памяти) и Electron (платы с поддержкой подключения к сети мобильной связи 3G/2G). Платформа Particle и сама очень интересна, поскольку базируется на облачном сервисе подключения устройств IoT, облачной IDE для разработки, например, на базе плат Photon, где используется язык похожий на C/C++ для Arduino. Фактически Particle – это отдельная тема для публикации, а проект Carloop однозначно заслуживает отдельного внимания со сороны энтузиастов автомобиля, как подключенного устройства IoT.
Подключив автомобиль к сети Интернет и сервисам IoT, можно реализовать множества сценариев, которые несомненно будут способствовать удобству эксплуатации транспортных средств, повышению комфорта и, просто, эфективному решению повседневных задач, конечно, включая и решение транспортных перевозок. Например, данные о стиле вождения, надежности работы двигателя и агрегатов автомобиля, вполне могут и уже сейчас учитываются страховыми компаниями. Текущее месторасположение автомобиля будет актуально для сервисов такси и аренды автомобилей. Взаимодействие участников дорожного движения стает более удобной при использовании IoT, так же проблема парковок, поиска свободных мест на стоянке, и многое-многое другое.
Надеемся, что идея этой публикации достигнута – в одном месте собраны материалы по работе с диагностическим разъемом OBD-II, как на уровне простого считывания кодов неисправностей, так и эмуляции физического подключения к автомобилю. Также надеемся на комментарии читателей. В завершении хочется отметить, что рассмотрены лишь некоторые вопросы разработки устройств Connected Car, но «за кадром» остались многие технологии, которые, так или иначе, превращают современный автомобиль в устройство IoT и делают поезки более комфортными и безопасными. Разумеется мы будем возвращаться к этим темам в наших будущих публикациях.