- Содержание
- Принцип действия [ править | править код ]
- Принцип действия трёхфазного асинхронного электродвигателя [ править | править код ]
- Классификация электродвигателей [ править | править код ]
- Двигатели постоянного тока [ править | править код ]
- Двигатели пульсирующего тока [ править | править код ]
- Двигатели переменного тока [ править | править код ]
- Универсальный коллекторный электродвигатель [ править | править код ]
- Синхронный электродвигатель возвратно-поступательного движения [ править | править код ]
- История [ править | править код ]
- Электродвигатель у бактерий [ править | править код ]
- Принцип работы электродвигателей. Основные понятия.
- Чередование полюсов с помощью переменного тока
- Индукция
- Принцип действия электродвигателей
- Статор элетродвигателя
- Ротор элетродвигателя
- Асинхронные электродвигатели
- Что такое ротор
- Что такое статор
- Статор и ротор в асинхронных двигателях
- Короткозамкнутый ротор
- Фазный ротор

Содержание
Принцип действия [ править | править код ]
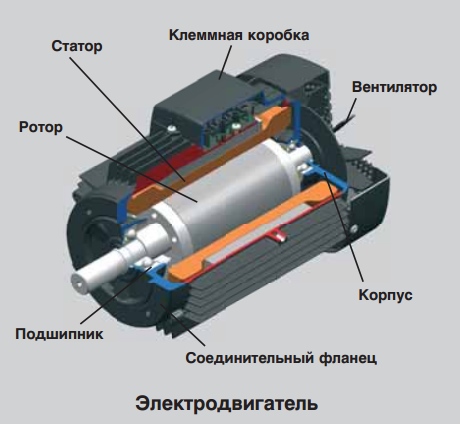
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя [ править | править код ]
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.

На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f <displaystyle f> 
>>
При частоте 50 Гц получаем для p <displaystyle p>
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и закорачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трёхфазная обмотка, похожая на обмотку статора, включённую, например, звездой; начала фаз соединяются с тремя контактными кольцами, закреплёнными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щётки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Асинхронные электродвигатели широко применяются в тяжелой промышленности в качестве вспомогательных машин для компрессоров или выпрямительных установок.
Асинхронные электродвигатели имеют ряд преимуществ перед коллекторными, такие как :меньший износ якоря за счет отсутствия коллектора, вариативность управления, более высокий КПД и простота конструкции.
Классификация электродвигателей [ править | править код ]
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создаётся вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока [ править | править код ]

Двигатель постоянного тока — двигатель, переключение фаз в котором осуществляется прямо в самом двигателе. Благодаря этому такой двигатель может питаться постоянным током, но так же и переменным.
Данная группа двигателей в свою очередь разделяется по способу переключения фаз и наличию обратной связи подразделяется на:
Щёточно-коллекторный узел обеспечивает электрическое синхронное переключение цепей вращающейся части машины и является наиболее ненадёжным и сложным в обслуживании конструктивным элементом. [1]
По типу возбуждения коллекторные двигатели можно разделить на:
- Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- Двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть — параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели в котором переключение фаз осуществляется с помощью специального электронного блока (инвертора), могут быть с обратной связью с использованием датчика положения ротора, либо без обратной связи, фактически аналог асинхронного.
Двигатели пульсирующего тока [ править | править код ]
Двигатель пульсирующего тока — электрический двигатель, питание которого осуществляется пульсирующим электрическим током. По конструкции очень близок к двигателю постоянного тока. Его конструктивными отличиями от двигателя постоянного тока являются шихтованные вставки в остове, шихтованные дополнительные полюса, большее число пар полюсов, наличие компенсационной обмотки. Применяется на электровозах с установками для выпрямления переменного тока [2]
Двигатели переменного тока [ править | править код ]

Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения.
Синхронные электродвигатели подразделяются на [3] :
- синхронный двигатель с обмотками возбуждения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше). [4]
- синхронный двигатель с постоянными магнитами;
- синхронный реактивный двигатель;
- гистерезисный двигатель;
- шаговый двигатель;
- гибридный синхронный реактивный двигатель с постоянными магнитами;
- реактивно-гистерезисный двигатель.
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель [ править | править код ]
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном, и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127, 220 В, для постоянного 110, 220 В. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 Гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока. Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включёнными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону. Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию). Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин. Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током). Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
Синхронный электродвигатель возвратно-поступательного движения [ править | править код ]
Принцип его работы заключается в том, что подвижная часть двигателя представляет собой постоянные магниты, закреплённые на штоке. Через неподвижные обмотки пропускается переменный ток и постоянные магниты под действием магнитного поля, создаваемого обмотками, перемещают шток возвратно-поступательным образом. [5]
История [ править | править код ]
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода [6] . Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Электродвигатель у бактерий [ править | править код ]
Электродвигатель из нескольких белковых молекул преобразует энергию электрического тока в виде движения протонов во вращение жгутика, используемого для передвижения некоторыми видами бактерий. [7] [8]
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
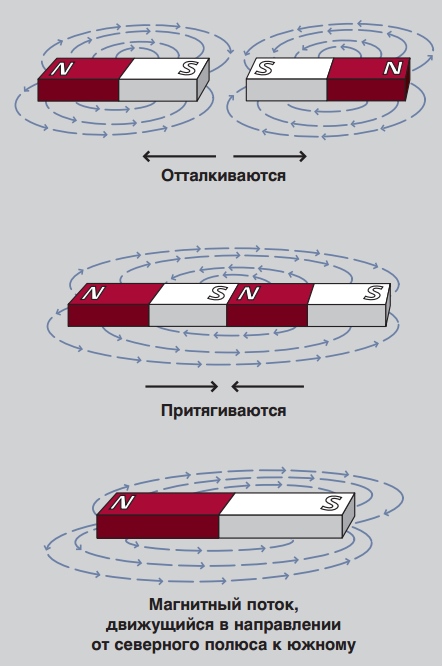
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
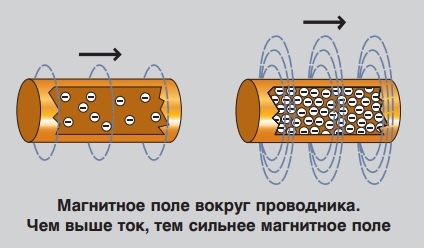
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
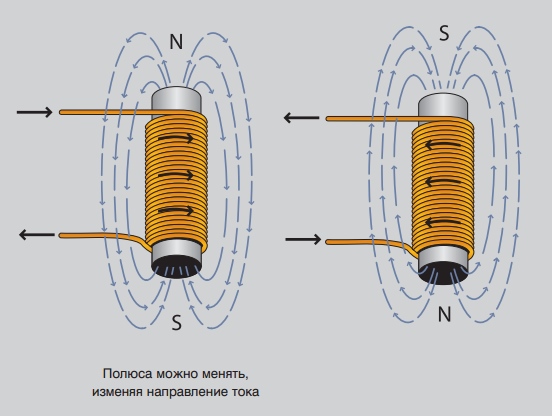
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
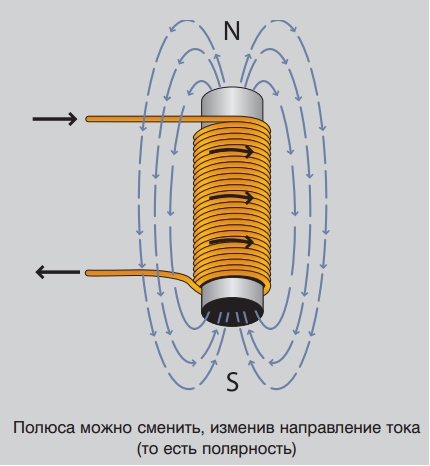
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
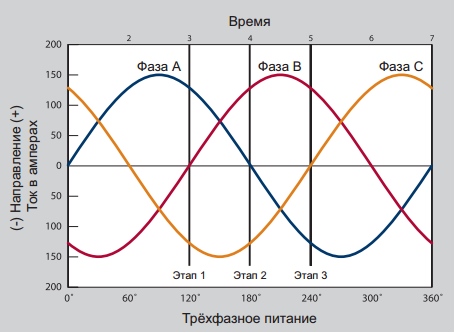
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
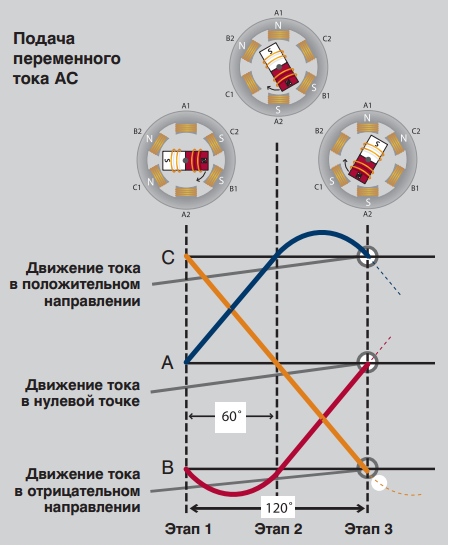
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
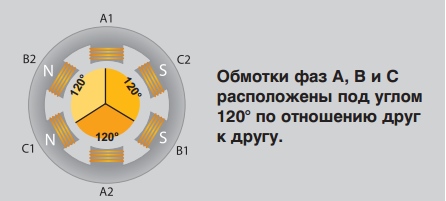
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
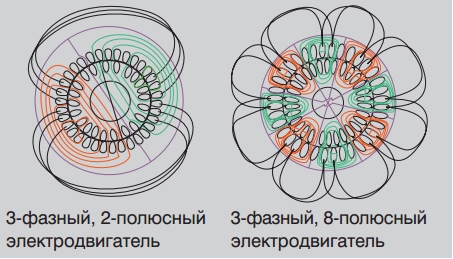
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
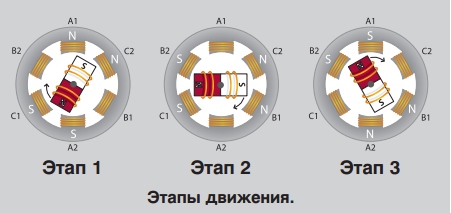
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
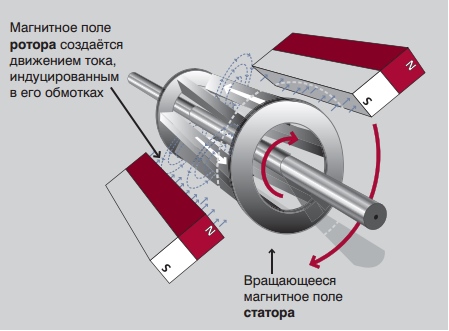
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
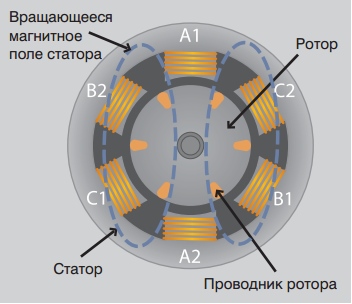
Индукционные электродвигатели состоят из ротора и статора.
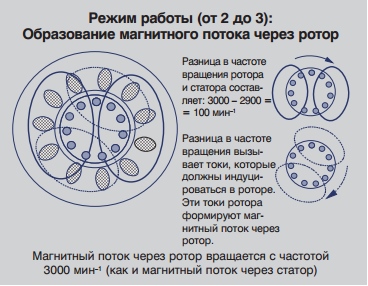
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
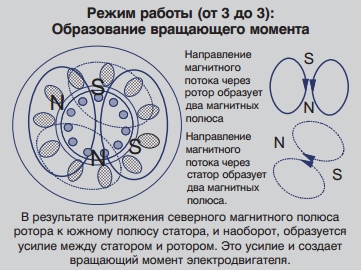
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

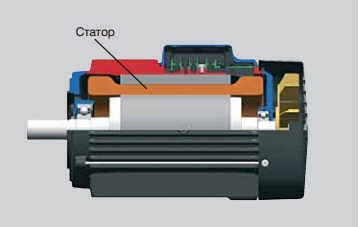
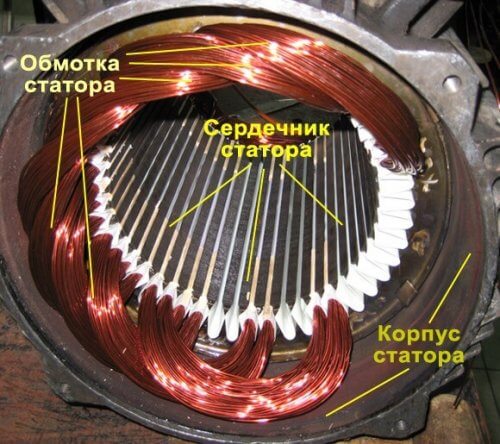
Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
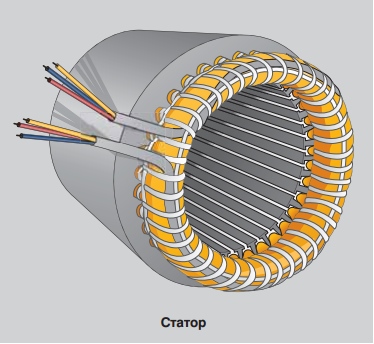
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
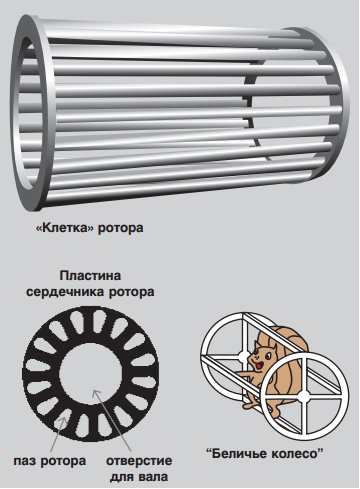
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
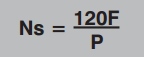
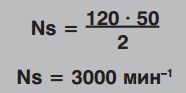
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Число полюсов
Синхронная частота вращения 50 Гц
Синхронная частота вращения 60 Гц
Что такое ротор
Ротор, еще его иногда называют якорь, это подвижная, то есть вращающаяся часть в генераторе или электродвигателях, которые повсеместно применяются в бытовой и промышленной технике.

Если рассматривать ротор двигателя постоянного тока или универсального коллекторного двигателя, то он состоит из нескольких основных узлов, а именно:
- Сердечник. Он выполнен из множества штампованных тонких металлических пластин, изолированных друг от друга специальным диэлектриком или же просто оксидной пленкой, которая проводит ток гораздо хуже, чем чистый металл. Сердечник набирается из них и представляет собой «слоеный пирог». В результате электроны не успевают разогнаться из-за маленькой толщины металла, и нагрев ротора гораздо меньше, а эффективность всего устройства выше за счет уменьшения потерь. Данное конструктивное решение принято для уменьшения вихревых токов Фуко, которые неизбежно возникают при работе двигателя из-за перемагничивания сердечника. Этот же метод борьбы с ними используется и в трансформаторах переменного тока.
- Обмотки. Вокруг сердечника особым образом намотана медная проволока, покрытая лаковой изоляцией для предотвращения появления короткозамкнутых витков, которые недопустимы. Вся обмотка дополнительно пропитана эпоксидной смолой или лаком для фиксации обмоток, чтобы они не повреждались при вибрациях от вращения.
- Обмотки ротора могут подключаться к коллектору – специальному блоку с контактами, надежно закрепленному на валу. Эти контакты называются ламелями, они выполнены из меди или ее сплава для лучшей передачи электрического тока. По нему скользят щетки, обычно выполненные из графита, и в нужный момент на обмотки подается электрический ток. Это называется скользящий контакт.
- Сам вал является металлическим стержнем, на его концах расположены посадочные места под подшипники качения, он может иметь резьбу или выемки, пазы под шпонку для крепления шестерен, шкивов или других деталей, приводимых в движение электродвигателем.
- На валу также размещается крыльчатка вентилятора, чтобы двигатель охлаждал сам себя и не приходилось бы устанавливать дополнительное устройство для отвода тепла.
Стоит отметить, что не у всякого ротора есть обмотки, которые, в сущности, представляют собой электромагнит. Вместо них могут применяться постоянные магниты, как в бесщеточных двигателях постоянного тока. А у асинхронного двигателя с короткозамкнутым ротором обмоток в привычном виде вовсе нет, вместо них используются короткозамкнутые металлические стержни, но об этом ниже.
Что такое статор
Статор – это неподвижная часть в электродвигателе. Обычно он совмещен с корпусом устройства и представляет собой цилиндрическую деталь. Он так же состоит из множества пластин для уменьшения нагрева из-за токов Фуко, в обязательном порядке покрытых лаком. На торцах располагаются посадочные места под подшипники скольжения или качения.
Конструкция называется пакет статора, она впрессовывается в чугунный корпус устройства. Внутри этого цилиндра вытачиваются пазы под обмотки, которые, так же как и для ротора, пропитываются специальными составами, чтобы тепло равномернее распределялось по устройству, и обмотки не терлись друг об друга от вибрации.
Обмотки статора могут подключаться разными способами в зависимости от назначения и типа электрической машины. Для трехфазных электродвигателей применимы типы подключения звезда и треугольник. Они представлены на схеме:

Для выполнения подключений на корпусе устройства предусмотрена специальная распределительная коробка («борно»). В эту коробку выведены начала и концы трех обмоток и предусмотрены специальные клеммники различных конструкций, в зависимости от мощности и назначения машины.
Существуют серьезные отличия в работе двигателей при разном соединении обмоток. Например, при подключении звездой двигатель будет стартовать плавнее, однако нельзя будет развить максимальную мощность. При присоединении треугольником, электродвигатель будет выдавать весь крутящий момент, заявленный производителем, но пусковые токи в таком случае достигают высоких значений. Электросеть может быть просто не рассчитана на такие нагрузки. Использование устройства в этом режиме чревато нагревом проводов, и в слабом месте (это места соединения и разъемы) провод может отгореть и привести к пожару. Главным преимуществом асинхронных двигателей является удобство в смене направления их вращения, нужно просто поменять местами подключения двух любых обмоток.
Статор и ротор в асинхронных двигателях
Трехфазные асинхронные двигатели имеют свои особенности, ротор и статор в них отличаются от использованных в других типах электродвигателей. Например, ротор может иметь две конструкции: короткозамкнутый и фазный. Рассмотрим особенности строения каждого из них по подробнее. Однако для начала давайте вкратце разберемся, как работает асинхронный двигатель.
В статоре создается вращающееся магнитное поле. Оно наводит на роторе индуцируемый ток и тем самым приводит его в движение. Таким образом ротор всегда пытается «догнать» вращающееся магнитное поле.
Необходимо также упомянуть о такой важной особенности асинхронного двигателя, как скольжение ротора. Это явление заключается в разности частот вращения ротора и магнитного поля, создаваемого статором. Объясняется это как раз тем, что ток индуцируется в роторе только при его движении относительно магнитного поля. И если бы частоты вращения были одинаковы, то этого движения бы просто не происходило. В результате ротор пытается «догнать» по оборотам магнитное поле, и если это происходит, то ток в обмотках перестает индуцироваться и ротор замедляется. В этот момент сила, действующая на него, растет, он начинает опять ускоряться. Так и получается эффект стабилизации частоты вращения, за что эти электродвигатели и пользуются большой востребованностью.

Короткозамкнутый ротор
Он также представляет собой конструкцию, состоящую из металлических пластин, выполняющих функцию сердечника. Однако вместо медной обмотки там установлены стержни или пруты, не касающиеся друг друга и накоротко замкнутые между собой металлическими пластинами на торцах. При этом стержни не перпендикулярны пластинам, а направлены под углом. Это делается для уменьшения пульсаций магнитного поля и момента. Таким образом получаются витки, замкнутые накоротко, от сюда и название.

Фазный ротор
Главное отличие фазного ротора от короткозамкнутого заключается в наличии трехфазной обмотки, уложенной в проточки сердечника и соединяющейся в особом коллекторе с тремя кольцами вместо ламелей. Эти обмотки обычно соединяются «звездой». Такие электродвигатели более трудоемки в производстве за счет усложнения конструкции, однако их пусковые токи ниже, чем у двигателей с короткозамкнутым ротором, а также они лучше поддаются регулировке.

Надеемся, что после прочтения данной статьи у вас больше не осталось вопросов о том, что такое ротор и статор электродвигателя и какой у них принцип работы. Напоследок рекомендуем просмотреть видео, в котором наглядно рассмотрен данный вопрос: