- Что такое шаговый двигатель?
- Преимущества и недостатки шагового электродвигателя
- Устройство и принцип работы
- Типы шаговых двигателей
- По конструкции ротора
- Реактивный
- С постоянными магнитами
- Гибридные
- Биполярный
- Подключение шагового двигателя
- Типичные схемы подключения ШД
- Управление шаговым двигателем
- Без контроллера
- С контроллером
- Популярные схемы управления ШД
- Простейший драйвер шагового двигателя своими руками
- Блог о электронике
- 201 thoughts on “Управление шаговым двигателем”
Владимир Рентюк, Запорожье, Украина
Часть 2. Схемотехника систем управления
Выше были рассмотрены наиболее важные общие вопросы использования шаговых двигателей, которые помогут в их освоении. Но, как гласит наша любимая украинская поговорка: «Не повірю поки не провірю» («Не поверю, пока не проверю»). Поэтому перейдем к практической стороне вопроса. Как уже отмечалось, шаговые двигатели – это удовольствие не из дешевых. Но они имеются в старых принтерах, считывателях гибких и лазерных дисков, например, SPM-20 (шаговый двигатель для позиционирования головки в дисководах 5"25 Mitsumi) или EM-483 (от принтера Epson Stylus C86), которые можно найти у себя в старом хламе или купить за копейки на радиобазаре. Примеры таких двигателей представлены на Рисунке 8.
 |
 |
| а) | б) |
а) Шаговый двигатель SPM-20 для позиционирования головки в
дисководах 5"25 Mitsumi. (Фото с сайта).
б) Шаговый двигатель EM-483 от принтера Epson Stylus C86. (Фото с сайта).
Наиболее простыми для начального освоения являются униполярные двигатели. Причина кроется в простоте и дешевизне их драйвера управления обмотками. На Рисунке 9 приведена практическая схема драйвера, использованного автором статьи для униполярного шагового двигателя серии P542-M48 [6].
 |
|
| Рисунок 9. | Драйвер униполярного шагового двигателя. (Дополнительная информация по подключению на Рисунках 10 и 12). |
Естественно, что выбор типа транзистора для ключей управления обмотками должен происходить с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое соединение MOSFET с ИМС коммутатора может быть недопустимым. Как правило, в затворах устанавливаются последовательно включенные резисторы небольших номиналов. Но в ряде случае необходимо предусмотреть еще и соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с небольшим током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить, по крайней мере, 15 мА (хотя для нормальной работы ключа необходимо, чтобы ток базы равнялся 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы. Как хороший компромисс, можно использовать IGBT, сочетающие в себе достоинства полевых и биполярных транзисторов.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC(ON) MOSFET, но с учетом рекомендаций, описанных выше. Мощность, рассеиваемая на ключах для выбранного в качестве примера двигателя серии P542-M48, при полной остановке ротора не превысит
PVT = RDC(ON) × I 2 = 0.25 × (0.230) 2 = 13.2 мВт.
Транзисторы IRLML2803 с RDC(ON) = 0.25 Ом имеют допустимую мощность рассеяния 540 мВ и постоянный ток стока 0.93 А при температуре 70 °С. Так что, они полностью соответствуют требованиям и обеспечат надежную работу драйвера. В большинстве случаев, учитывая низкие частоты коммутации, проведенной выше оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их выбора и полного расчета можно воспользоваться методикой, приведенной, например, в [7].
Еще одним важным моментов является правильный выбор так называемых снаберных диодов, шунтирующих обмотку двигателя (VD1…VD4 на Рисунке 9). Назначение этих диодов – гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом. Обратите внимание, что в мощные MOSFET такие диоды, как правило, уже встроены.
Режим управления двигателем задается коммутатором. Как уже было отмечено выше, наиболее удобным и эффективным является управление с перекрытием фаз (Рисунок 4б). Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора, который использовал автор статьи как в ряде отладочных модулей (в том числе, и с приведенным выше драйвером), так и для практических применений, приведена на Рисунке 10.
 |
|
| Рисунок 10. | Схема универсального коммутатора шагового двигателя (с реверсом). |
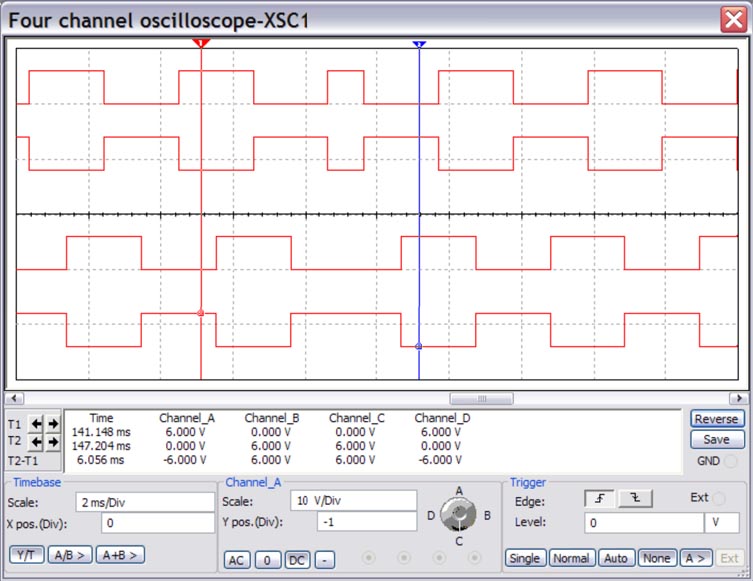
Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны). Временная диаграмма работы коммутатора приведена на Рисунке 11.
 |
|
| Рисунок 11. | Временная диаграмма универсального коммутатора с реверсом. Верхние две осциллограммы – Q1 D2-2, Q2 D2-2; нижние две – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз. |
Хочу обратить внимание читателей: в Интернете вы могли встретить похожую схему, выполненную не на D-триггерах, а на JK-триггерах. Будьте внимательны! В ряде этих схем допущена ошибка в подключении ИМС. Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной, а диаграмма управления будет аналогичной той, которая приведена на Рисунке 11 (осциллограммы до переключения очередности фаз).
 |
|
| Рисунок 12. | Упрощенная схема коммутатора шагового двигателя (без реверса). |
Поскольку особых требований к сигналу «ШАГИ» не предъявляется, для его формирования может использоваться любой подходящий по уровням выходного сигнала генератор. Для своих отладочных модулей автор использовал генератор на базе ИМС таймера 555 (Рисунок 13).
 |
|
| Рисунок 13. | Регулируемый генератор импульсов для коммутатора шагового двигателя. |
Для питания собственно двигателя можно использовать схему, приведенную на Рисунке 14, а схему коммутатора и генератора питать или от отдельного источника питания +5 В или через дополнительный маломощный стабилизатор. Земли силовой и сигнальной частей в любом случае необходимо разделить.
 |
|
| Рисунок 14. | Схема питания шагового двигателя с режимами удержания и выключения. |
Схема на Рисунке 14 обеспечивает подачу двух стабильных по уровню напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания. (Формулы, необходимые для расчета выходного напряжения, приведены в [8]). Рабочий режим включается подачей высокого логического уровня на контакт «ТОРМОЗ» разъема Х1. Допустимость снижения напряжения питания определяется тем, что, как уже отмечалось в первой части статьи, момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя P542-M48 момент удержания с редуктором 25:6 равен 19.8 Н·см, а момент вращения всего 6 Н·см. Этот подход позволяет при остановке двигателя уменьшить потребление мощности с 5.52 Вт до 1.38 Вт! Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт «ВКЛ/ВЫКЛ» разъема Х1.
Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах VT1, VT2 необходимости нет, и выходы можно подключить непосредственно вместо упомянутых ключей.
Примечание: В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автор использовал катушку SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя можно уменьшить до 16 – 18 В, что не скажется на его работе. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания.
Задача управления биполярными двигателями более сложна. Основная проблема в драйвере. Для этих двигателей требуется драйвер мостового типа, и делать его, тем более в современных условиях, на дискретных элементах – неблагодарная задача. Да, этого и не требуется, так как имеется очень большой выбор специализированных ИМС. Все эти ИМС условно можно свести к двум типам. Первый – весьма популярная у любителей робототехники ИМС L293D STMicroelectronics [9] или ее варианты от Texas Instruments. Они относительно недороги и подходят для управления маломощными двигателями с током обмоток до 600 мА. ИМС имеют защиту от перегрева; устанавливать ее необходимо с обеспечением теплоотвода, которым служит фольга печатной платы [9]. Второй тип – это уже знакомая читателям по публикации в [1] ИМС LMD18245 [2].
Автор использовал драйвер L293DD в схеме для управления биполярным двигателем малой мощности типа 20M020D2B 12 В/0.1 А во время изучения проблемы использования шаговых двигателей. Этот драйвер удобен тем, что содержит четыре полумостовых ключа, поэтому для управления биполярным шаговым двигателем требуется всего одна ИМС. Полная схема, приведенная в [10] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. На Рисунке 15 показано включение ИМС драйвера (с привязкой к коммутатору из Рисунка 10), поскольку именно эта часть сейчас представляет для нас интерес, а Figure 6 (Bipolar Stepping-Motor Control) из спецификации [9] не совсем понятна начинающему пользователю. Она вводит в заблуждение, например, тем, что показаны внешние диоды, которые на самом деле встроены в ИМС и прекрасно справляются с обмотками маломощных двигателей. Естественно, что драйвер L293D может работать с любым коммутатором. Выключается драйвер логическим нулем по входу R.
Примечание: ИМС L293, в зависимости от изготовителя и суффиксов, указывающих на тип корпуса, имеют различия в нумерации и количестве выводов!
 |
|
| Рисунок 15. | Схема подключения драйвера L293DD. |
Для более мощных двигателей автор статьи использовал драйверы LMD18245. Полная схема тестового модуля приведена на Рисунке 16.
 |
|
| Рисунок 16. | Схема управления биполярным шаговым двигателем с использованием драйвера LMD18245. |
В отличие от L293DD, LMD18245 является не четырех-, а двухканальным драйвером, поэтому для реализации схемы управления требуются две ИМС. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло. В качестве задающего генератора использовалась схема, приведенная ранее на Рисунке 13, но с увеличенным до 4.7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка BH1, позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «ВЫКЛ» ротор двигателя освобождается, и его вращение импульсами управления становится невозможным. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженной вдвое мощностью потребления. Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях вращения моментом. Необходимо заметить, что поскольку при полношаговом управлении «two-phase-on» включены обе обмотки, ток двигателя удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резисторы R3, R8).
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах (Рисунок 10). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резисторы R3, R8), и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [2]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока выполняется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор, не включенный непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность. Для рассматриваемой схемы максимальный ток в амперах, согласно приведенной в [2] формуле, составляет:
VDAC REF – опорное напряжение ЦАП (в рассматриваемой схеме 5 В);
D – задействованные разряды ЦАП (в этом режиме используются все 16 разрядов);
RS – сопротивление токоограничивающего резистора (R3 = R8 = 10 кОм).
Соответственно, в режиме удержания (поскольку используются 8 разрядов ЦАП), максимальный ток составит 1 А.
В заключение необходимо отметить, что драйвер LMD18245 позволяет реализовать и микрошаговое управление. Как упоминалось выше, такой режим уменьшает, и даже подавляет паразитный резонанс ротора. Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП.
Как можно видеть из предложенной статьи, шаговые двигатели хоть и сложнее в управлении, чем коллекторные, но не настолько, чтобы отказываться от них. Как говорили еще древние римляне: «Дорогу осилит идущий». Естественно, что на практике для многих приложений управление шаговыми двигателями целесообразно делать на основе микроконтроллеров, которые легко сформируют нужные команды для драйверов и выполнят роль коммутаторов. Дополнительную информацию и более детальное рассмотрение проблем, связанных с применением шаговых двигателей, кроме как по упомянутым выше ссылкам [3, 4, 7], можно почерпнуть из ставшей уже классикой монографии Кенио Такаши [11] и на специализированных интернет-сайтах, например, [12].
Есть еще один момент, на который автор статьи хотел бы обратить внимание читателей. Шаговые двигатели, как впрочем, и все двигатели постоянного тока, обратимы. Что имеется ввиду? Если приложить внешнее вращающее усилие к ротору, то с обмоток статора можно снять ЭДС, то есть двигатель становится генератором, причем весьма и весьма эффективным. Автор статьи экспериментировал с этим вариантом использования шаговых двигателей во время работы консультантом по силовой электронике в компании, занимающейся ветроэнергетикой. Необходимо было на простых макетах отработать ряд практических решений. По наблюдению автора статьи, эффективность шагового двигателя в таком применении была выше, чем у аналогичного по параметрам и габаритам коллекторного двигателя постоянного тока. Но это уже другая история.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
 С переменным магнитным сопротивлением
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.



 Униполярный ШД
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
 Схема Н-моста
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
 Схема простейшего драйвера
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Блог о электронике
 |
| Первая модификация силового блока. L293 вытащена. |
 |
| Вид снизу |
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями . Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Униполярный отличается от биполярного только тем, что ему нужна куда более простая схема управления, а еще у него значительно слабее момент. Так как работает он только половинами обмоток. НО! Если оторвать нафиг средний вывод униполярника, то мы получим обычный биполярный . Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов. Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры . Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
 |
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298 , подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Правда на будущее, когда я буду делать роботу шаговый привод, я возьму не связку L297+L293 , а микруху L6208 которая может и чуть слабей по току, но зато два в одном! Сразу подключай двигатель и работай. Если же их покупать, то на L6208 получается даже чуть дешевле.
201 thoughts on “Управление шаговым двигателем”
А можешь посоветовать шаговик из тех, которые сейчас можно купить?
Я не знаю как у всех, но я д аже двухдюймовые флопики повыкидывал лет пять назад, а 5-ти дюймовых и в помине не было.
По продаваемым не в курсе. В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
Оппа, теперь самое время разбираться, что за шаговики у меня имеются по результатам годового потрошения CD-DVD ROM’ов. 🙂
А в сидюках/дивдюках вроде бы стоят обычные коллекторники+синхронный на шпиндель. Хотя могут быть и шаговики, но я не встречал ни разу.
Шаговики во многих CD/DVD приводах стоят — для таскания каретки с лазером (у меня минимум 3 таких экземпляра валяются). Но конструкция двигателя — как в трехдюймовых дисководах, для практического применения неудачная.
ну когда я расотрошил сиди ром там был безколлекторник + еще какойто на шпиндель
для безколлекторника я думаю применение в моделизме
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может пригодится кому
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может чем пригодится там модельный регултор хода
может управлять сдромным безколлекторником
работал с шаговыми движками на своей фирме.
ещё с нашими совеццкими и руссийскими.
сколько раз коротыш верещал на источниках — не счесть ) единственное оправдание — я про них ещё тогда ничего не знал и доков не имел. работал методом тыка…
всё хорошо, но нету обратной связи.
зы! от постоянных замыканий избавлялись частыми переключениями обмоток, когда надо было застопорить двигло.
. в смысле от постоянных замыкани? Как ты умудрялся его коротнуть? Одновременным замыканием ключей верхнего и нижнего плеча? Так там Dead Time надо ставить!
юзал четырёхконтактный.
помню, что если подавать на обмотки долгое время неизменный сигнал, то будет такое.
хотя потом, когда пришёл паспорт на движок, то там было сказано, что можно так стопорить его.
Долгая подача напруги на обмотки это его нормальный рабочий режим. Главное чтобы напряжение было номинальным.
Полезно, спасибо. Мне в свое время довелось раскурочить 8″ дисковод. Два шаговика лежат дожидаются своего часа. Так, что информация может пригодиться.
У меня этих дисководов полтора десятка штук!
Есть интересная статья по использованию шаговых двигателей
Журнал Современная электроника Октябрь 2004 г. стр. 46-47
Автор: Олег Пушкарев, Омск, конструкция на базе PIC16F84 и
драйвера — ULN2003A. (WWW.SOEL.RU)
Журнал очень рульный, советую почитать, статьи высылают
по почте, по запросу или подписка (в том числе бесплатная).
Еще одна задача — управление двигателем
постоянного тока на 24 в (12В), реверс,
управление скоростью. Есть буржуйская схема,
но без регулятора, могу тиснуть, схема из
стриммера, реверс-технология схемы.
кто знаком с драйвером шины ULN2804a b ULN2004a , какая разници между ними.
Кажется, один для КМОП, другой — для ТТЛ. Схема отличается только номиналом сопротивления от входного штырька до базы транзистора. В одном случае — 10ком (для КМОП), в другом — кажется, 1,5 ком, точно не помню. Ну, и входные уровни соответственно разные. В остальном — одинаково. Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
У меня есть движок от древнего лазерного принтера. Двигатель фирмы CANON PM60-H418Z21B можно ли запустить таку вещь? Торчат из него по 3 провода с каждой обмотки. P.S. С шаговиками я делов не имел пока, но очень интересно.
Думаю без проблем. Судя по признакам это униполярный двигатель. Так что определяй где у него середина обмотки и дальше как я описал. Тока замерь сопротивление, чтобы узнать максимальный ток.
«>