Читайте также:
- I- кривая распределения потенциалов II- кривая распределения напряжения прикосновения
- II. Основные «напряжения» современной социокультурной ситуации и системное движение
- T не константа, время преобразования зависит от величины преобразуемого напряжения
- Автоматические системы стабилизации напряжения
- Амплитуды напряжения, тока и индуцируемой ЭДС в колебательном контуре определяются соотношениями
- Асинхронный линейный электропривод
- Асинхронный последовательный интерфейс
- В каких случаях при работе на линии требуется снятие напряжения с контактного рельса.
- В каких случаях при работе на линии требуется снятие напряжения с контактного рельса.
- В. Дуга переменного тока в условиях отключения цепей низкого напряжения
- ВЕКТОРНАЯ МОДЕЛЬ УПРАВЛЕНИЯ ДВИГАТЕЛЬНЫМИ И ВЕГАТАТИВНЫМИ РЕАКЦИЯМИ
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления αа в функции внешнего сигнала Uy. Изменяя угол управления αа от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля. Форма напряжения статора является несинусоидальной.
Несинусоидальное напряжение представим как совокупность нес-кольких синусоидальных напряжений –— гармоник с определенной час-тотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1,ь а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.На рис.8.14,(б)показаны механические характеристики АД при изменении напряжения на его статоре.
Регулирование напряжения на статоре не приводит к изменению скорости ХХωw и не влияет на критическое скольжение sK, но изменяет значение критического (максимального) момента МKк. Критический момент пропорционален квадрату напряжения: МK к
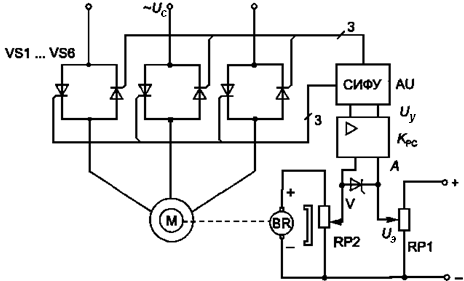
Рис. 8.11.Схема асинхронного ЭП с тиристорным пусковым устройством
Скольжение s определяется зависимостью, где ω – скорость идеаль-
ного холостого хода АД:
Скольжение sопределяется зависимостью
где w — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и венти-ляцию:
где М – — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ро-тору через воздушный зазор:
Разность мощностей  рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
 . (8.1)
. (8.1)
Часть электромагнитной мощности, пропорциональная скольжению s, рассеивается в виде теплоты в обмотке ротора, другая часть, пропор-циональная (1 — s), передается на вал двигателя, т.е.
 (8.2)
(8.2)
Т. о.,Способ регулирования скорости изменением напряжения является неэкономичным, так как потери в роторе при постоянном моменте наг-рузки возрастают пропорционально скольжению.
Из (8.1) получим выражение длямомент двигателя:
 , (8.3)
, (8.3)
где т –— число фаз статора; r2–— сопротивление ротора.
 .
.
В установившемся режиме работы момент двигателя М равен мо-менту сопротивления МсМС. Для вентиляторной нагрузки

Вывод. Токи АД  обратно пропорциональны
обратно пропорциональны  .
.
Продифференцировав последнее выражение, легко показать, что токи имеют максимальное значение при s = 1/3 или ωw = 2/Зωw. Для постоянного момента нагрузки полу-чаем:
 .
.
| Рис. 8.12. Характеристика АД с повышенным сопротивлением статора |
Cопротивление ротора является важным параметром, влияющим на токи двигателя. Для получения удов-летворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу необходимо применять двигатели с повышенным сопротивлением ротора, обеспечи-вающим номинальное скольжение 10. 12 %. При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше.
На рис. 8.12 приведены харак-теристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 8.11 показывает, что при применении двигателя с повышенным сопротив-лением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с пере-менным сопротивлением ротора. Обычные глубокопазовые или двух-кле-точные двигатели в этих случаях оказываются малоэффективными. Луч-шие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя.
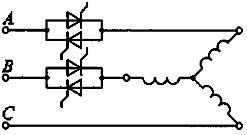
Все перечисленные мероприятия не могут существенноо устранить потери в роторной цепи,что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, (см. рис.7.8,а) могут быть использованы 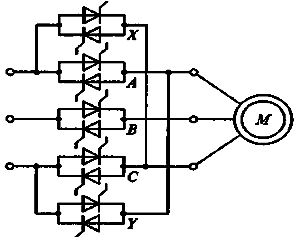 обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
| Рис. 8.13. Схема тиристорного регулятора напряжения для реверсивной схемы |
| Рис. 8.14. Схема несимметричного регулятора напряжения асинхронного двигателя |
 Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Схема регулятора напряжения может содержать только два тирис-тора, включенных в одну из фаз статора двигателя. Однако в несиммет-ричных схемах усугубляются проблемы, связанные с нагревом двига-теля, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Для несиммет-ричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае не равны друг другу

Если магнитная цепь АД не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих заменяется двумя системами симметричных напряжений прямой и обратной после-довательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях. Если принять угловую скорость прямого поля ωwпр = ωwо за положительную, то угловая скорость обратного поля ωwобр = -ωwо В соответствии с этим скольжение относительно поля прямой последовательности вычисляется по формуле

а последовательности:относительно поля обратной последовательности по формуле

Момент, развиваемый двигателем при асимметричной системе нап-ряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей::
 .
.
Поскольку каждая из рассматриваемых систем напряжений симмет-рична, для них справедливы известные формулы расчета момента АД.
Несмотря на все отмеченные недостатки, система ТРН-АД вследст-вие ее простого конструктивного исполнения, нашла широкое примене-ние в связи с тем, что она позволяет обеспечить плавный пуск и тормо-жение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные ре-версивные и нереверсивные контакторы для пуска, реверса и торможе-ния АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в ЭП насосных и вентиляторных установок.
Дата добавления: 2014-11-29 ; Просмотров: 6305 ; Нарушение авторских прав? ;
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
 Фото — мощный регулятор для асинхронного двигателя
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото — регулятор оборотов двигателя постоянного тока
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
![]() Фото — шим контроллер оборотов
Фото — шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото — схема регулятора для коллекторного двигателя
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
.</li></ol><p>Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.</p><p>При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.</p><p style=)
 Фото — схема регулятора для бесколлекторных двигателей
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото — схема регулятора оборотов своими руками
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
«>