Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
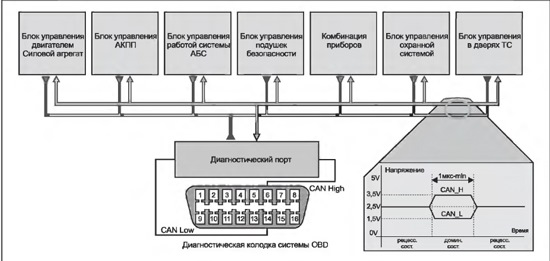
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Чтобы связно и гармонично управлять системами, обеспечить качество и функциональность передачи данных, многие автомобилестроительные компании применяют современную систему, известную как CAN-шина. Принцип ее организации заслуживает подробного рассмотрения.
Общая характеристика
Визуально CAN-шина выглядит как асинхронная последовательность. Ее информация передается по двум витым проводникам, радиоканалу или оптоволокну.
Управлять шиной способны несколько устройств одновременно. Их количество не ограничено, а скорость обмена информацией запрограммирована до 1 Мбит/с.
CAN-шина в современных автомобилях регламентируется спецификацией "CAN Sorcjfication version 2,0".
Он состоит из двух разделов. Протокол А описывает передачу информации с применением 11-битной системы передачи данных. Часть В выполняет эти функции при применении 29-битного варианта.
CAN имеет узлы персональных тактовых генераторов. Каждый из них посылает сигналы всем системам одновременно. Получающие устройства, присоединенные к шине, определяют, относится ли сигнал к их компетенции. Каждая система обладает аппаратной фильтрацией адресованных ей посланий.
Разновидности и маркировка
Одной из самых известных на сегодняшний день является разработанная Робертом Бошем CAN-шина. CAN BUS (под таким названием известна система) бывает последовательная, где импульс подается за импульсом. Она называется Serial bus. Если же информация передается по нескольким проводам, то это параллельная шина Parallel bus.
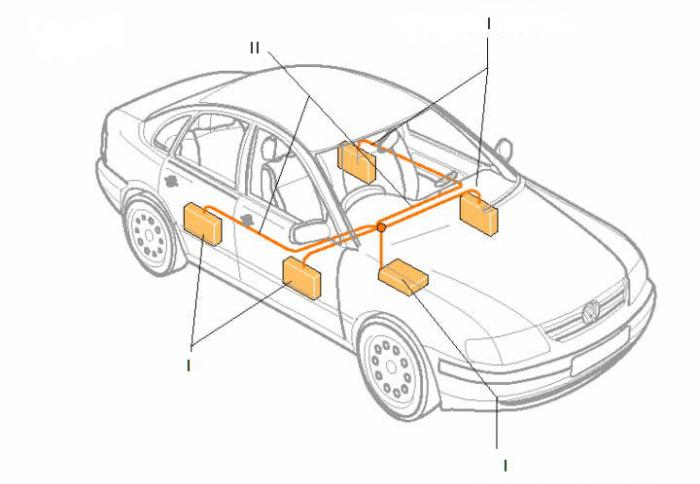
I — узлы управления;
II — коммуникации системы.
Опираясь на разновидности идентификаторов КАН-шин, встречается маркировка двух типов.
В случае, когда узел поддерживает 11-битный формат обмена информацией и не обозначает ошибки на сигналы 29-битного идентификатора, его маркируют "CAN2,0A Active, CAN2,0B Passive".
Когда таковые генераторы используют оба типа идентификаторов, шина имеет маркировку "CAN2,0B Active".
Встречаются узлы, поддерживающие коммуникации в 11-битном формате, а увидев в системе 29-битный идентификатор, выдают сообщение об ошибке. В современных автомобилях подобные CAN-шины не используются, ведь система должна быть логичной и согласованной.
Система же функционирует при двух типах скоростей передачи сигналов — 125, 250 кбит/с. Первые предназначены для вспомогательных устройств (стеклоподъемники, освещение), а вторые обеспечивают главное управление (коробка-автомат, двигатель, ABS).
Передача сигналов
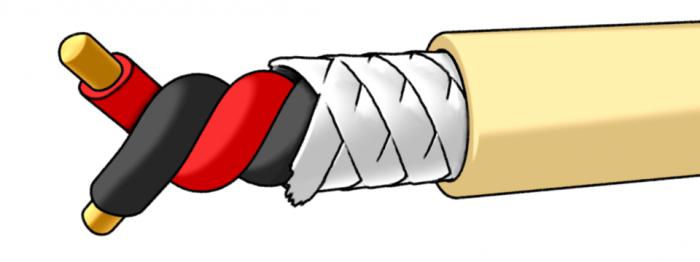
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.

Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Разновидности функций шин
Существуют разные типы представленного устройства.

- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система "Комфорт" — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы "Комфорт".
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
При изучении вопроса, чем является CAN-шина, может показаться, что по количеству программ она похожа на систему самолета. Однако, дабы обеспечить качество, безопасность и комфорт при управлении автомобилем, никакие программы не будут лишними.
Помехи в шине
Все управляющие блоки присоединены к CAN-шине трансиверами. Они имеют приемники сообщений, представляющих собой избирательные усилители.
Описание шины CAN оговаривает поступление посланий по проводникам High и Low в усилитель дифференциальный, где он обрабатывается и направляется в блок управления.
Усилитель определяет этот выходной сигнал как разность напряжений проводов High и Low. Такой подход позволяет исключить влияние внешних помех.
Чтобы понять, что собой представляет КАН-шина и ее устройство, следует вспомнить ее облик. Это два проводника, скрученные между собой.
Так как сигнал помехи поступает сразу на оба провода, в процессе обработки значение напряжения Low отнимается от напряжения High.
Далее из полученного показателя извлекается базовое напряжение, которое составляет 2,5 В. Остаток и есть помеха. Она в отфильтрованном сигнале не присутствует.
Благодаря этому CAN-шина считается надежной системой.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
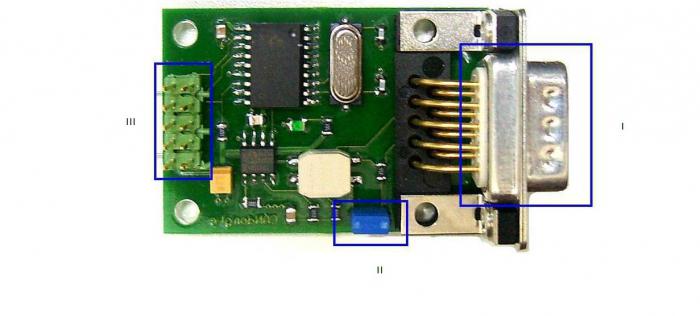
II — резистор сопротивления;
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Чтобы понять, что такое CAN-шина, следует разобраться в ее функциональном назначении.
Она призвана передавать фреймы в реальном времени, которые содержат информацию о значении (например, перемена скорости) или о возникновении события от одного узла-передатчика к приемникам программы.
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Чтобы понять, что такое КАН-шина, следует изучить ее компоненты. Максимальная длина проводника при скорости 1 Мбит/с достигает 40 м. Шина- CAN (известная еще как CAN-BUS) в конце наделена терминатором.

Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Технология iCAN
Рассматривая шины транспортного средства, следует уделить внимание программе блокировки работы двигателя.
Для этого разработан обмен данными посредством шины CAN, iCAN-модулем. Он подключается к цифровой шине и отвечает за соответствующую команду.
Имеет небольшие габариты и присоединяется к любому отделению шины. При старте движения автомобиля iCAN посылает команду соответствующим блокам, и мотор глохнет. Преимуществом данной программы является отсутствие разрыва сигнала. Существует инструктирование электронного блока, после этого сообщение отключает функционирование соответствующих исполнительных элементов.
Этот тип блокировки характеризуется наивысшей скрытностью, а потому и надежностью. При этом ошибки не записываются в память ЭБУ. CAN-шина предоставляет всю информацию о скорости, движении автомобиля данному модулю.
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.
Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.

Современный автомобиль, к сожалению или к счастью — решать Вам, уже не тот ящик на колесах, с полутора десятками проводов, в котором мог разобраться мало-мальски грамотный человек, и даже починить, если что-то сломалось…
Современный автомобиль — это уже компьютер на колесах, хотите ли Вы этого или нет… И даже если Вы и не подозреваете об этом, то только по причине того, что занимаются ремонтом Вашего автомобиля профессионалы. Именно они и должны выполнять все работы на Вашем авто. Соответственно и установку дополнительного оборудования лучше доверить специалистам.
Часто при обсуждении вопросов дополнительной охраны автомобиля приходится "читать лекции" клиентам, объясняя, иногда очень долго, почему на их автомобиль сигнализация должна ставиться не 1 час, а как минимум 10 часов, а иногда и полтора — два дня. И часто в этих разговорах приходится упоминать такое словосочетание как "Кан шина", что частенько вводит в ступор клиентов.
Так что же это такое — КАН ШИНА?
И для чего она в автомобиле?
Сначала ответ на вопрос — для чего?:
Как сэкономить медь?:
Подсчитано, что за последние пять лет число опций в автомобиле, являющихся в большинстве своем потребителями электрической энергии, увеличилось вдвое. И произошло это вовсе не по прихоти автопроизводителей, а благодаря растущим потребностям покупателей в комфорте и законодательным требованиям к безопасности и охране окружающей среды
Все бы ничего, но возможности электрооборудования не безграничны. И если раньше конструкторы решали вопросы, в основном связанные с увеличением надежности, то сейчас приходится думать над созданием принципиально новых схем, которые либо изменят традиционную "архитектуру" электрики, либо позволят ей приспособиться к поступи научно-технического прогресса.
Шины не для колес:
Использующаяся до сих пор однопроводная схема подразумевает, что отрицательные выводы всех потребителей электроэнергии соединяются с "массой" — кузовом и другими металлическими частями автомобиля, которые выступают в роли второго, минусового провода. Однако когда общая длина реальных проводов, подключенных от потребителей к плюсу генератора, достигла полукилометра, а их вес приблизился к центнеру, выяснилось, что однопроводная схема не столь уж и хороша, какой казалось прежде.
Поэтому появилась мультиплексная проводка, а с ней — шина CAN (от Controller Area Network), которую при традиционном сохранении минуса на "массе" применяют вместо "растолстевших" жгутов старой схемы на современных моделях машин, насыщенных электроприводами и электронными блоками.
Далее неплохая статья объясняющая принципы конфигурирования и управления всеми устройствами в современном автомобиле:
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников, которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы "Комфорт" (блок управления подушками безопасности, блоками управления в дверях автомобиля и т.д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы "Комфорт" и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.