- СПОРТИВНЫЙ ВАРИАНТ ПУТЕШЕСТВИЯ БИЗНЕС-КЛАССОМ.
- BMW M550d xDRIVE.
- Активное рулевое управление (AL) и регулировка угла бокового увода задней оси (HSR)
- Краткое описание узла
- блок управления активного руля
- Механизм наложения угла поворота с серводвигателем и блокиратором серводвигателя
- Блок управления HSR
- Исполнительный механизм регулировки крена задней оси
- Блок управления ICM
- Системные функции
- Комплексная система интегрального активного рулевого управления
- Указание! Принудительное взаимодействие систем активного рулевого управления и регулировки бокового увода задней оси!
- разделенные функции
- Сервотроник
- Указание! Соблюдать другие описания функционирования!
- стабилизация параметров движения
- Распознавание цепей противоскольжения (только цепи противоскольжения, аттестованные BMW)
- Указания для службы сервиса
- Общие указания
- Указания по диагностике
- Указание! Обращать внимание на сервисные функции!

Интегральное активное рулевое управление — следующий этап развития уже знакомой системы активного рулевого управления, известного по более ранним кузовам БМВ.
Основное нововведение — активное подруливание задними колесами автомобиля.
Основные функции системы:
1. Расширение активного рулевого управления (AL) функцией подруливания задними колесами HSR
2. Переменное передаточное отношение (перекрывание угла поворота колес)
3. Свободный выбор угла поворота задних колес (steer by wire)
4. Сервотроник
5. Функции стабилизации движения
6. Сокращение тормозного пути при торможении на покрытиях с различными коэффициентами сцепления
Блок управления ICM считывает следующие внешние сигналы, необходимые
для интегрального активного рулевого управления:
• Угловые скорости колес (4 сигнала), поступают по шине FlexRay от DSC
• Угол поворота рулевого колеса, поступает по шине FlexRay от блока SZL
• Состояние исполнительных устройств AL и HSR, передача через Flexray
Регулировка рулевого управления
Как базовое рулевое управление, так и отдельно заказываемое интегральное активное рулевое управление в
имеет функцию „сервотроник“. Она заключается в усилении момента поворота управляемых колес и реализуется имеющимся у рулевого механизма клапаном сервотроника.
Независимо от комплектации автомобиля, клапаном сервотроника управляет ICM. Соответственно алгоритм функции „Сервотроник“ заложен также в ICM.
Независимо от наличия SA, у рулевого управления имеется также управляемый ICM пропорциональный клапан.
С помощью этого клапана можно электронно регулировать подачу насоса гидроусилителя. Поэтому он так и называется „Клапан электронной регулировки объемного расхода“, сокращенно: EVV.
Этим клапаном управляет все тот же ICM. В зависимости от востребованного в настоящий момент усиления момента поворота создаваемый насосом гидроусилителя рулевого управления объемный поток распределяется между клапаном рулевого управления и перепускным контуром. Такое распределение происходит плавно. Чем меньшее усиление момента поворота требуется, тем больше рабочей жидкости перенаправляется в перепускной контур. Так как рабочая жидкость в перепускном контуре не совершает никакой работы, то это ведет к снижению потребления мощности насосом гидроусилителя рулевого управления. За счет этого перепускной клапан способствует снижению расхода топлива и соответственно выброса CO2.
Функция регулировки динамики
Вмешательство систем управления динамикой нацелено на улучшение резвости автомобиля и сцепления
его колес с дорогой. Разумеется, при необходимости их задача состоит и в том, чтобы вернуть автомобилю устойчивость.
Раньше за это отвечали несколько систем, хоть и общающихся между собой, но все же наделенных строго очерченным кругом задач. Поэтому из взаимодействие, которое, собственно, и определяет динамику автомобиля в целом, было трудно согласовать.
При данной системе ситуация иная: здесь ICM имеет центральную функцию регулировки динамики. Она сравнивает желание водителя с фактическим режимом движения автомобиля. и определяет, требуется ли
вмешательство систем управления динамикой и если требуется, то какое.
Исходным параметром, с которым работает центральная функция регулировки динамики, является момент вращения автомобиля вокруг вертикальной оси.
Он вызывает поворот автомобиля вокруг вертикальной оси, который накладывается на его движение. Если автомобиль движется не так, как того хочет водитель, то его динамика корректируется. Классическим примером этого может служить недостаточная или избыточная поворачиваемость.
Новым является то, что ICM задействует системы управления динамикой еще до того, как упомянутые
отклонения будут обнаружены. То есть раньше, чем в динамике автомобиля появится хоть какая-то нестабильность.
Поэтому ход автомобиля становится намного более гармоничным, чем при обычной конструкции ходовой части. Автомобиль сохраняет нейтральные ходовые качества – без избыточной или недостаточной поворачиваемости.
Возможным это стало благодаря очень точным расчетным моделям и новым алгоритмам, которые используются для оценки динамики автомобиля и воздействия на нее.
Скоординированное действие систем управления динамикой
Для создания момента вращения автомобиля вокруг вертикальной оси, вычисленного центральной функции регулировки динамики раньше имелись (и сейчас имеются) следующие возможности.
В скобках указана соответствующая система управления динамикой движения.
• Индивидуальное задействование тормозных механизмов колес (DSC)
• Подстройка текущего крутящего момента двигателя (ASC+T, DSC, MSR)
• Регулировка угла поворота передних колес независимо от задаваемых водителем значений (активное рулевое управление).
Функция, следующая за центральной функцией регулировки динамики – „Координация исполнительных устройств“. Она решает, с помощью какой системы управления динамикой момент рысканья должен создаваться в той или иной ситуации.
Если у автомобиля возникла, например, сильная склонность к недостаточной поворачиваемости, то устранить ее поможет целенаправленное тормозящее воздействие на внутреннее по отношению к центру поворота заднее колесо.
У оснащенного интегральным активным рулевым управлением автомобиля та же цель еще гармоничнее достигается соответствующим углом поворота задних колес. Так как обе возможности имеют свои границы, то иногда целесообразно использовать их одновременно. Предупреждение недостаточной поворачиваемости делает автомобиль ощутимо резвее.
В настоящий момен функции ICM впервые объединены в сеть с функциями системы управления вертикальной динамикой.
Под этим имеется в виду не только то, что ICM собирает информацию о дорожном просвете, обрабатывает ее и передает VDM.
Центральная функция регулировки динамики подразумевает и то, что ICM также активирует функцию Dynamic Drive, чтобы корректировать собственную поворачиваемость. Как известно по обычной ходовой части, жесткий стабилизатор подвески ограничивает достижимую силу бокового увода. Система Dynamic Drive с поворотными двигателями в стабилизаторах позволяет сымитировать действие как очень жесткого, так и менее жесткого стабилизатора. Поэтому через активные стабилизаторы Dynamic Drive центральная функция регулировки динамики в ICM может целенаправленно влиять на силу бокового увода. При избыточной повора чиваемости задний мост имеет слишком маленький запас бокового увода. Момент
стабилизации крена на задней оси в этом случае уменьшается. боковой увод при этом увеличивается, и автомобиль стабилизируется.
Функциональные диапазоны интегрального рулевого управления
Диапазон низких скоростей
Переменное передаточное отношение активного рулевого управления уменьшает количество оборотов рулевого колеса, необходимых для перемещения передних колес из одного крайнего положения в другое, примерно до двух. В диапазоне низких скоростей (до 60 км/ч) к переменному передаточному отношению на переднем мосту добавляется подруливание задними колесами с поворотом в противоположную сторону. Это
улучшает манёвренность автомобиля.
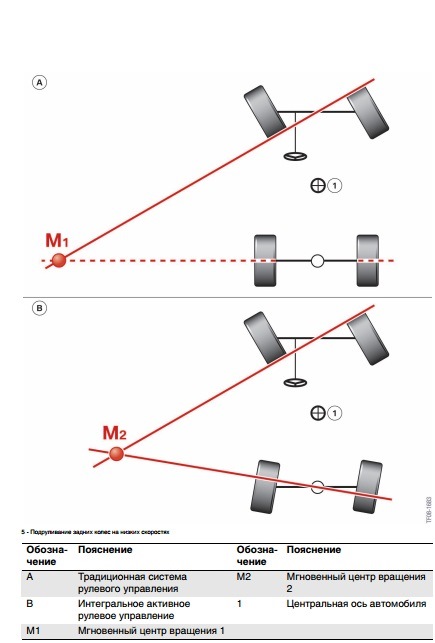
При прохождении поворота автомобиль поворачивается вокруг так называемого мгновенного центра вращения „M“.
У обычных автомобилей он находится на продолжении заднего моста.
При подруливании задними колесами на скорости до 60 км/ч они поворачиваются в направлении. противоположном повороту.
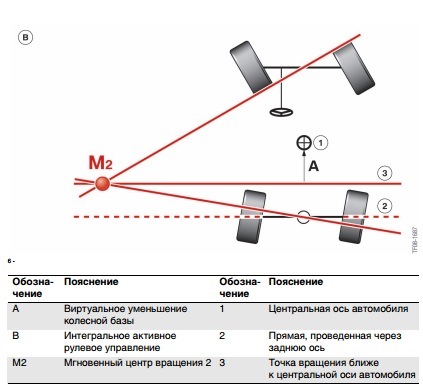
Результатом подруливания задними колесами становится смещение точки вращения к центральной оси автомобиля при тех же затрачиваемых водителем усилиях.
В плане маневренности и динамики эта картина соответствует автомобилю с более короткой колесной базой.
Диапазон высоких скоростей
С увеличением скорости движения вмешательство активного рулевого управления, а именно передаточное
отношение рулевого управления, уменьшается.
При этом изменяется стратегия интегрального активного рулевого управления. В то время как на низких скоростях задние колеса поворачиваются в сторону, противоположную направлению поворота, на высоких скоростях они поворачиваются в одном направлении с передними колесами.
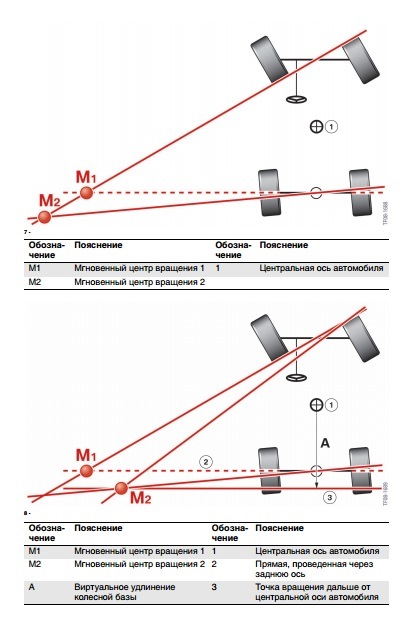
Мгновенный центр вращения уходит назад, что соответствует автомобилю с более длинной колесной базой и обеспечивает стабилизацию при прямолинейном движении. Радиус поворота становится больше.
За счет соединения с активным рулевым управлением на переднем мосту образуется дополнительный угол поворота, и радиус поворота, а также необходимый поворот руля остаются на привычном уровне.
В итоге благодаря координации вмешательств активного рулевого управления на переднем и заднем мостах перестроение происходит увереннее без ущерба для маневренности.
Объединение активного рулевого управления с подруливанием задними колесами дает преимущество во всех скоростных режимах.
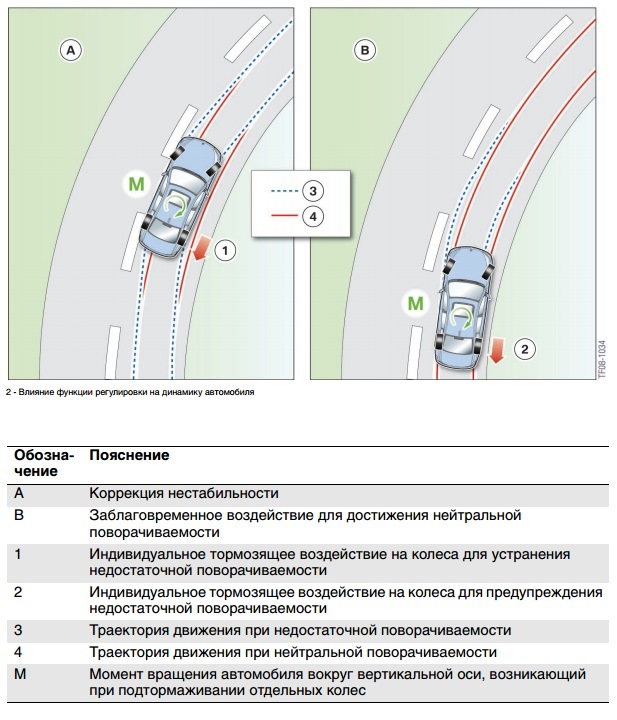
Стабилизация с помощью интегрального активного рулевого управления при недостаточной поворачиваемости
При быстром перестроении все автомобили „грешат“ рысканьем и рискуют попасть в траекторию с избыточной поворачиваемостью.
Если регулятор динамики ICM распознает отклонение режима движения от задаваемого водителем значения, то он инициирует определенную коррекцию управления передними и задними колесами. Быстрая стабилизирующая коррекция динамики практически незаметна для водителя.
Можно с легкостью отказаться от притормаживания с помощью DSC.
Результат – автомобиль становится более управляемым и меньше кренится.
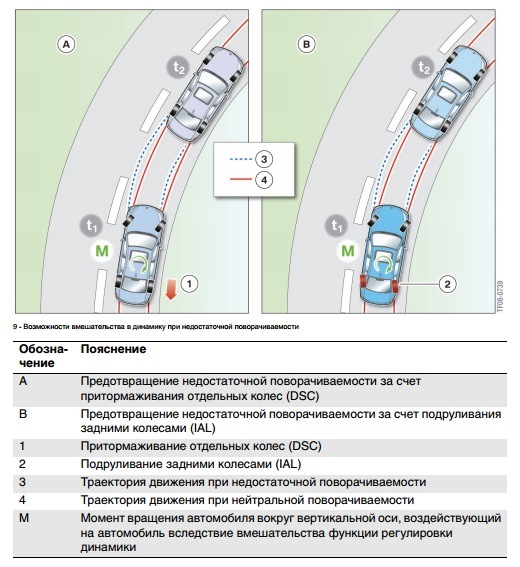
Если водитель на высокой скорости слишком поздно войдет в поворот, то из-за недостаточной поворачиваемости он рискует не вписаться в него.
По идее (это обусловлено принципом действия), активное рулевое управление должно было бы реагировать только на избыточную поворачиваемость автомобиля.
Интегральное активное рулевое управление с подруливающими задними колесами может теперь корректировать динамику и при недостаточной поворачиваемости, что дополнительно повышает активную безопасность.
Стабилизация с помощью интеграль ного активного рулевого управления при µ-раздельном торможении (торможение на покрытиях с различным коэффициентом трения)
При резком торможении на дороге, одна половина которой скользкая, автомобиль начинает рыскать, уклоняясь от курса в сторону с менее скользким покрытием.
При экстренном торможении водитель обычного автомобиля должен принять соответствующие контрмеры.
При таком так называемом раздельном торможении регулятор динамики создает стабилизирующий момент вращения автомобиля вокруг вертикальной оси за счет поворота задних колес в сторону,
противоположную направлению поворота передних колес.
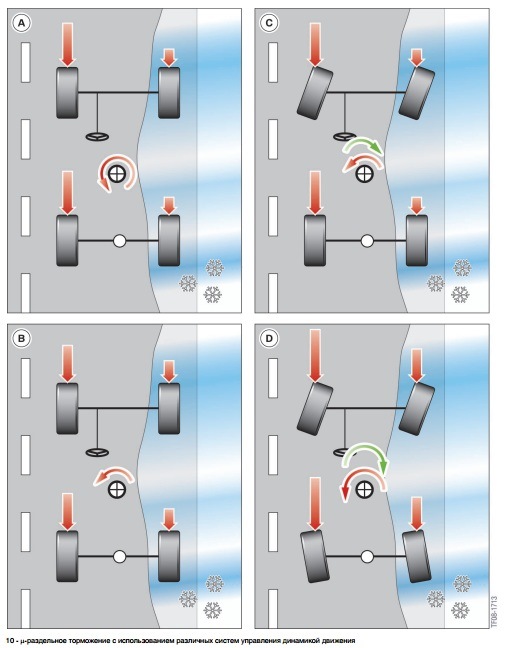
A) Без DSC
У автомобиля без DSC на сухой половине дороги появляются максимальные тормозные усилия, а на мокрой или обледеневшей – очень незначительные.
В результате возникает большой момент вращения автомобиля вокруг вертикальной оси против часовой стрелки, что приводит к заносу вправо.
В) С DSC
Автомобиль с DSC дозирует тормозные усилия на отдельные колеса, удерживая момент вращения автомобиля вокруг вертикальной оси в диапазоне сохранения управляемости, что немного увеличивает тормозной путь.
C) С DSC и AL
Дополнительная функциональная возможность "Компенсирование момента вращения вокруг вертикальной оси" является важным фактором безопасности.
При торможении на дорожном полотне с различными коэффициентами трения (асфальт, лед или снег) возникает момент (момент вращения автомобиля вокруг вертикальной оси), который может привести к потере устойчивости движения автомобиля. В этом случае DSC рассчитывает угол поворота передних
колес и активное рулевое управление преобразует это задание в активный поворот руля в обратном направлении.
При этом создается момент, противодействующий вращению автомобиля вокруг вертикальной оси, и, таким
образом, момент вращения „компенсируется“ (устраняется), это значит, автомобиль стабилизируется благодаря четкому взаимодействию торможения DSC и функции AL и, единственный в своем классе, получает новый аспект безопасности.
D) С DSC, регулятором динамики и интегральным активным рулевым управлением
При таком так называемом раздельном торможении регулятор динамики создает стабилизирующий момент вращения автомобиля вокруг вертикальной оси за счет поворота задних колес в сторону, противоположную направлению поворота передних колес.
Это компенсирует рысканье автомобиля из-за однобокого воздействия тормозных усилий.
При этом могут применяться максимальные тормозные усилия для получения кратчайшего тормозного пути.
Разработка интегрального активного рулевого управления – логичное усовершенствование систем активного рулевого управления. Функции систем идеально дополняют друг друга, задавая новые масштабы ощущений от вождения автомобиля.
СПОРТИВНЫЙ ВАРИАНТ ПУТЕШЕСТВИЯ БИЗНЕС-КЛАССОМ.
Несравненная динамика — отличительная черта автомобилей BMW. В BMW 5 серии Седан это свойство ощущается особенно сильно — каждый метр пути дарит истинное удовольствие за рулем.
BMW M550d xDRIVE.
Инженеры BMW M воплотили свой уникальный опыт в модели BMW M550d xDrive с уникальными специально подобранными настройками трансмиссии, подвески и рулевого управления. Результат — автомобиль, восхищающий сочетанием бескомпромиссной динамичности, комфорта и повседневной практичности. Эффектные элементы дизайна экстерьера и салона подчеркивают спортивный характер автомобиля, выделяя его среди других седанов BMW 5 серии, — в лучших традициях M.
Внешний вид
Гены M, унаследованные моделью BMW M550d xDrive, создают ощущение динамического превосходства уже при первом взгляде на автомобиль. Спортивность дизайна подчеркивает целый ряд оригинальных и эксклюзивных деталей.
Даже на расстоянии модель BMW M550d xDrive отличается от остальных. Специально разработанный дизайн опциональных 20-дюймовых легкосплавных дисков делает автомобиль заметным на дороге. Уникальные воздухозаборники в широком переднем бампере не только добавляют дерзости внешнему облику автомобиля, но и улучшают охлаждение двигателя и тормозов. Притягивающие взгляд накладки наружных зеркал цвета ‘Ferric Grey’ готовы встретить сопротивление самого сильного встречного ветра. Динамичность задней части подчеркнута надписью «M550d» и патрубками выхлопной системы глянцевого черного цвета.
Салон
Гены M создают уникальную атмосферу внутри нового BMW 5 серии Седан: сплав спортивных элементов и элегантной архитектуры салона обспечивает уникальное настроение в салоне BMW 550d xDrive.
Металлические накладки порогов, украшенные надписью "M550d", обращают на себя внимание, как только Вы открываете дверь. Они подчеркивают эксклюзивность автомобилей BMW M GmbH, проявляющаяся в высококачественных материалах отделки салона — и в удовольствии, которое водитель испытывает за рулем. Кожаное рулевое колесо М типа передает уникальные ощущения контроля над автомобилем, обеспечивая абсолютную управляемость и безупречную точность в любой ситуации. Интегрированные подрулевые переключатели передач позволяют быстрее и комфортнее менять передачи — для еще большего удовольствия от вождения. Любители экстремального прохождения поворотов оценят идеальную эргономику спортивных сидений M с изысканной обивкой тканью и алькантарой, гарантирующих уверенную плотную посадку и стабильность. Логотипы M на приборной панели и рычаге переключения передач — еще один спортивный дизайнерский штрих. Декоративные планки из алюминия ‘Hexagon’ и отделка потолка BMW Individual благородного цвета ‘Антрацит’ усиливают впечатление эксклюзивности.
Активное рулевое управление (AL) и регулировка угла бокового увода задней оси (HSR)
Комбинация активного рулевого управления (АРУ) и регулировки угла бокового увода задней оси (HSR) носит название интегрального активного рулевого управления: Дополнительное оборудование 2VH.
Интегральное активное рулевое управление может влиять на задаваемый водителем поворот управляемых колес без изменения угла поворота рулевого колеса. Тем самым, впервые угол поворота колес передней и задней оси задается независимо от действий водителя.
Это дает следующие преимущества:
- Благодаря оптимальному для любой скорости движения переменному передаточному отношению рулевого механизма автомобиль может двигаться точно к цели в спортивной манере. Это уменьшает нагрузку на водителя и вносит дополнительный вклад в активную безопасность.
- При низкой скорости движения наблюдается высокая маневренность и подвижность автомобиля. Диаметр разворота автомобиля уменьшается.
- При высокой скорости движения наблюдается уверенность и комфортность вождения. Автомобиль немедленно реагирует на команды.
В этом документе описаны функции системы интегрального активного рулевого управления с регулировкой угла бокового увода задней оси. Функции системы активного рулевого управления передней оси подробно описаны в ”Диагностике систем автомобиля” 320103001.
Краткое описание узла
- блок управления активного руля
- Механизм наложения угла поворота с серводвигателем и блокиратором серводвигателя
- Блок управления HSR
- Исполнительный механизм регулировки крена задней оси
- ЭБУ ICM
блок управления активного руля
ЭБУ АРУ расположен на днище автомобиля в левой части пространства для ног и защищен специальным кожухом. ЭБУ АРУ предназначен для активизации серводвигателя активного рулевого управления. Кроме того, блок управления AL обрабатывает сигналы датчика положения двигателя. Встроенный в блок управления AL датчик температуры контролирует выходной каскад серводвигателя.
Интегрированная система управления ходовой частью (ICM) является блоком управления высшего уровня для систем регулировки ходовой части.
ЭБУ активного рулевого управления соединен с бортовой сетью с помощью 4 разъемов. Блок управления AL является абонентом шины FlexRay.
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Блок управления активного рулевого управления (AL) | 2 | Разъем 12‐контактный (кабельная сеть автомобиля) |
| 3 | Разъем 3‐контактный (питание) | 4 | Разъем 3‐контактный (серводвигатель) |
| 5 | Разъем 12-контактный (датчик и блокиратор серводвигателя) | 6 | Защитный кожух |
Механизм наложения угла поворота с серводвигателем и блокиратором серводвигателя
Механизм наложения угла поворота системы активного рулевого управления расположен в рулевом механизме. Он встроен в разъемный вал рулевого управления. Механизм наложения угла поворота представляет собой планетарный механизм с двумя входами и одним выходом. Первый вход образует нижний вал рулевого управления. Второй вход образует червячную передачу в планетарном механизме. Серводвигатель приводит в действие (с активацией через блок управления AL) червячную передачу планетарного механизма. Передаточное отношение от червяка на червячное колесо составляет 20,5:1. На случай неисправности червячная передача имеет функцию самоторможения. Червячная передача изменяет угол поворота управляемых колес по сравнению с прямым приводом от вала рулевого управления. Создаваемый на шестерне рулевого механизма суммарный угол поворота складывается из:
- угол, на который повернуто рулевое колесо
- угол, который получается с помощью серводвигателя на механизме наложения угла поворота
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | С/двигатель активного рулевого управления | 2 | 4-контактный разъем |
| 3 | Датчик положения двигателя | 4 | 3-контактный разъем |
| 5 | Блокиратор серводвигателя | 6 | 2-контактный разъем |
| 7 | Клапан сервотроника (подсоединен к блоку управления ICM) | 8 | 2-контактный разъем |
Серводвигатель редуктора получает питание по 3 фазам (= проводам) (U, V, W). При коротком замыкании возможен поворот серводвигателя не более чем на 120°. Благодаря этому предотвращается неоправданное вращение серводвигателя в случае короткого замыкания. Встроенный в ЭБУ активного рулевого управления (АРУ) датчик температуры контролирует выходной каскад серводвигателя.
Блокиратор серводвигателя осуществляет его блокировку:
-
в случае ошибки для предотвращения его дальнейшего вращения под действием внешних сил
на стоящем автомобиле с выключенным двигателем (не на стоящем автомобиле с включенным двигателем).
При выключенном двигателе благодаря функции автоматического запуска и остановки двигателя блокиратор серводвигателя остается активным.
При блокировке блокиратор серводвигателя входит в зацепление с зубчатым венцом на червяке. Блокиратор серводвигателя в исходном положении находится под действием пружины и при подаче питания удерживается за счет усилия пружины. Прекращение подачи питания приводит, таким образом, к блокировке. Благодаря блокировке редуктора изменения передаточного отношения возможно продолжение управления водителем. Рулевое управление работает при этом как обычное рулевое управление. Чисто механическая связь между рулевым колесом и передними колесами сохраняется всегда.
Блок управления HSR
ЭБУ системы регулировки угла бокового увода задней оси (HSR) расположен в поддоне багажного отделения. ЭБУ HSR осуществляет управление серводвигателем, встроенным в актюатор системы регулировки угла бокового увода задней оси. Встроенный в ЭБУ HSR датчик температуры контролирует выходной каскад серводвигателя.
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | задний подрамник | 2 | Блок управления системы регулировки угла бокового увода заднего моста (HSR) |
| 3 | Исполнительный орган системы регулировки угла бокового увода заднего моста (HSR) |
В исполнительный механизм встроен датчик положения двигателя и датчик положения поперечной рулевой тяги. Сигналы от этих датчиков анализируются ЭБУ HSR. ЭБУ HSR подключен к FlexRay через ЭБУ активного рулевого управления (АРУ).
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Блок управления системы регулировки угла бокового увода заднего моста (HSR) | 2 | Разъем 12‐контактный (датчики) |
| 3 | Разъем 3‐контактный (серводвигатель) | 4 | Разъем 2-контактный (питание) |
| 5 | Разъем 12‐контактный (кабельная сеть автомобиля) |
Исполнительный механизм регулировки крена задней оси
В исполнительный орган встроены следующий узлы:
- Серводвигатель
- Датчик положения двигателя
- датчик положения поперечной рулевой тяги
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Исполнительный механизм регулировки крена задней оси | 2 | Разъем датчика положения поперечной рулевой тяги(4-контактный) |
| 3 | Разъем серводвигателя(3-контактный) | 4 | Штекерное соединение датчика положения поперечной рулевой тяги (4-контактное) |
Электромеханический актюатор состоит из серводвигателя, который через шпиндельный привод приводит в движение обе поперечные рулевые тяги. Поперечные рулевые тяги соединены с маятниковыми рычагами. Актюатор рассчитан на максимальный ход 8 мм, что соответствует углу поворота колеса макс. 3°. Шпиндельный привод рулевого управления задней осью имеет функцию самоторможения. В случае отказа системы динамика автомобиля идентична той, которая наблюдается при отсутствии рулевого управления задней осью.
Серводвигатель представляет собой бесщеточный двигатель трехфазного тока. Подача напряжения к серводвигателю в механизме наложения угла поворота осуществляется через три фазы (= провода): U, V, W. В случае короткого замыкания серводвигатель может продолжать вращаться под действием внешних сил (блокировка серводвигателя отсутствует). Следствием этого является заметный для водителя перекос рулевого колеса до 45°!
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Шаровой шарнир поперечной рулевой тяги левый | 2 | Гайка |
| 3 | Серводвигатель | 4 | Шаровой шарнир поперечной рулевой тяги правый |
| 5 | Разъем серводвигателя | 6 | Ходовой винт |
Датчик положения двигателя
Датчик положения двигателя состоит из магниторезистивного элемента и постоянного магнита. Постоянный магнит расположен на торцевой стороне вала ротора серводвигателя. Магниторезистивный элемент измеряет направление магнитного поля в горизонтальной и вертикальной плоскости. Диапазон измерения датчика положения двигателя составляет 180°. От датчика положения двигателя поступают 2 сигнала напряжения. Одному обороту на 360° соответствуют 2 последовательности сигналов. На основании обоих сигналов напряжения рассчитывается положение двигателя. Блок управления HRS считает количество полуоборотов и записывает его в память при выключении зажигания.
датчик положения поперечной рулевой тяги
Датчик положения поперечной рулевой тяги представляет собой бесконтактный позиционный датчик (PLCD = Permanentmagnetic Linear Contactless Displacement).Датчик положения поперечной рулевой тяги состоит в основном из сердечника, выполненного из специального магнитомягкого материала. Этот сердечник имеет по всей длине обмотку (первичная обмотка). На концах сердечника имеется дополнительная короткая обмотка для анализа данных. Сближение постоянного магнита с датчиком вызывает локальное магнитное насыщение. За счет этого определяется положение.
Блок управления ICM
Новое: В ICM встроены датчики DSC, которые раньше устанавливались отдельно. Эти датчики рассчитывают важные для динамики автомобиля величины:
- Продольное ускорение и наклон автомобиля в продольном направлении
- Поперечное ускорение и наклон автомобиля в поперечном направлении
- скорость вращения автомобиля вокруг вертикальной оси
ЭБУ ICM существует в вариантах Basis и High. Вариант High отличается следующим:
- более мощный микропроцессор (рассчитывает параметры регулировки для интегрального активного рулевого управления и активного круиз-контроля)
- резервные датчики поперечного ускорения и угла рысканья (необходимы для надежности интегрального АРУ).
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Верхняя часть корпуса | 2 | Винт крепления |
| 3 | Разъем (54‐контактный) | 4 | Распорная втулка |
| 5 | Нижняя часть корпуса |
Блок управления ICM расположен на туннеле коробки передач рядом с центром тяжести автомобиля.
Системные функции
- комплексная система интегрального активного рулевого управления (AL с HSR)
- разделенные функции
- Сервотроник
- стабилизация параметров движения
- Распознавание цепей противоскольжения (только цепи противоскольжения, аттестованные BMW)
Комплексная система интегрального активного рулевого управления
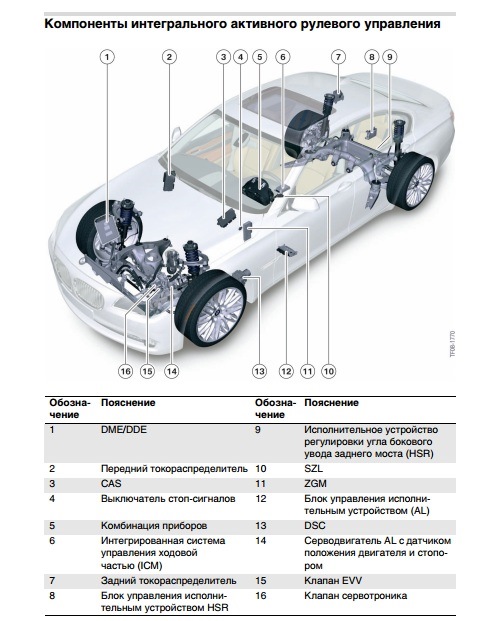
На следующем рисунке изображена комплексная система интегрального активного рулевого управления.
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Датчик угловой скорости переднего левого колеса | 2 | Система динамического контроля устойчивости (DSC) |
| 3 | Блокиратор серводвигателя | 4 | Серводвигатель |
| 5 | Цифровая электронная система управления двигателем (DME) или цифровая электронная система управления дизельным двигателем (DDE) | 6 | Датчик угловой скорости переднего правого колеса |
| 7 | Передний распределитель тока | 8 | Блок Junction Box (JBE) |
| 9 | Задний токораспределитель | 10 | Регулировка угла бокового увода заднего моста (HSR) |
| 11 | Датчик угловой скорости переднего правого колеса | 12 | Серводвигатель с датчиком положения двигателя и датчиком положения поперечной рулевой тяги |
| 13 | Встроенная система управления ходовой частью (ICM) | 14 | Выключатель стоп-сигналов |
| 15 | Активное рулевое управление (AL) | 16 | Датчик угловой скорости заднего левого колеса |
| 17 | коммутационный центр в рулевой колонке (SZL); | 18 | Комбинация приборов (KOMBI) |
| 19 | Система доступа в автомобиль (CAS) | 20 | Центральный межсетевой преобразователь (ZGM) |
Указание! Принудительное взаимодействие систем активного рулевого управления и регулировки бокового увода задней оси!
Система регулировки угла бокового увода задней оси не предлагается в качестве отдельного дополнительного оборудования.
разделенные функции
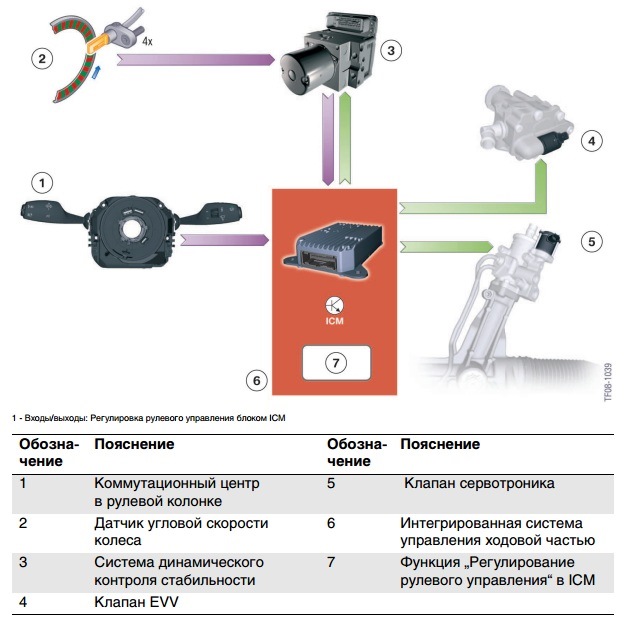
Интегрированная система управления ходовой частью (ICM) является ЭБУ высшего уровня, в котором рассчитываются заданные значения для системы интегрального активного рулевого управления. На основе текущего режима движения и угла поворота рулевого колеса, задаваемого водителем, блок управления ICM рассчитывает заданные значения для переменного передаточного отношения рулевого механизма и системы регулировки скорости вращения вокруг вертикальной оси. После определения приоритетов этих значений ЭБУ ICM передает итоговое заданное значение на ЭБУ АРУ и HSR. При этом речь идет о заданном угле, который должен устанавливаться на колесах передней и задней оси. Оба блока управления получают заданное значение и активируют исполнительный механизм так, чтобы заданное значение было преобразовано надлежащим образом. Таким образом, оба блока управления являются блоками управления исключительно для исполнительных механизмов.
Блоки управления подсоединены к шине FlexRay. При этом шина FlexRay проложена через блок управления AL к блоку управления HSR.
Сервотроник
Как базовая система рулевого управления, так и интегральное рулевое управление оснащены сервотроником. Эта зависимая от скорости система усиления рулевого привода реализована в виде клапана сервотроника, встроенного в рулевой механизм. Управление клапаном сервотроника всегда осуществляется блоком управления ICM. То есть, в блок управления ICM встроена также логическая схема сервотроника.
Кроме этого блок управления ICM управляет клапаном ECO. С помощью этого клапана регулируется объемный расход насоса гидроусилителя рулевого привода.
Указание! Соблюдать другие описания функционирования!
Относительно систем регулировки устойчивости автомобиля при движении соблюдать описания функционирования в диагностической системе.
стабилизация параметров движения
Если автомобиль, например, при прохождении поворотов демонстрирует избыточную поворачиваемость, то регулировка скорости вращения автомобиля вокруг вертикальной оси может откорректировать угол поворота передних колес. В результате этого повышается устойчивость автомобиля (и, соответственно, уровень комфортности). Таким образом, активное рулевое управление в подобной дорожной ситуации поддерживает систему динамического контроля стабильности (DSC). Только в случае, если стабилизации за счет рулевого управления недостаточно, вмешивается DSC.
При торможении на дорожном покрытии с различными коэффициентами трения в случае обычных систем водитель должен поворачивать руль в противоположном направлении. Активное рулевое управление вмешивается в подобной ситуации и стабилизирует движение автомобиля. По сравнению с чистым регулированием ABS при активном рулевом управлении и компенсации гироскопического момента обеспечивается уменьшение тормозного пути.
Распознавание цепей противоскольжения (только цепи противоскольжения, аттестованные BMW)
Активные системы рулевого управления не должны включаться или выключаться клиентом! В случае системы интегрального активного рулевого управления при установленных цепях противоскольжения на заднем мосту следует отказаться от стабилизации движения автомобиля на задних колесах. При использовании цепей противоскольжения функция управления задними колесами деактивируется для того, чтобы колеса могли свободно вращаться в любой ситуации.
При использовании цепей противоскольжения следует в меню ”Установка параметров” iDrive выбрать ”Надеты цепи противоскольжения”. В случае превышения максимально допустимой при использовании цепей противоскольжения скорости (прим. 65 км/ч) функция управления задними колесами снова активируется несмотря на установку ”Надеты цепи противоскольжения”!
Все расчеты для функции распознавания цепей противоскольжения производятся в блоке управления HSR. При этом функция распознавания цепей противоскольжения использует 2 способа. При скорости ок. 25 км/ч используются сигналы датчиков высоты дорожного просвета (левого переднего и левого заднего). При скорости 50 км/ч используются сигналы датчиков угловой скорости колес (левого переднего и левого заднего). По форме сигнала (образец обкатки звеньев цепи) определяется наличие цепей противоскольжения. Отдельные сигналы комбинируются блоком управления HSR всегда по общему критерию. Для функции сохранения работоспособности учитываются сигналы датчиков правого переднего и правого заднего колес.
Функция распознавания цепей противоскольжения активируется при наличии следующих условий:
- контакт 15 включен
- Скорость движения выше 4–6 км/ч
Функция распознавания цепей противоскольжения активирована, однако не производит никаких расчетов, если:
- Скорость движения выше 65 км/ч
- по истечении определенного времени цепи противоскольжения не распознаны
имеется сообщение системы автоматической диагностики для функции распознавания цепей противоскольжения.
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Постоянная контрольная лампа системы активного рулевого управления | 2 | Символ системы автоматической диагностики функции распознавания цепей противоскольжения (при превышении скорости 50 км/ч) |
| 3 | Символ системы автоматической диагностики для системы активного рулевого управления |
Указания для службы сервиса
Общие указания
- согласование встроенных в ICM датчиков
- согласование датчиков дорожного просвета
- инициализация интегрального активного рулевого управления.
Указания по диагностике
Указание! Обращать внимание на сервисные функции!
Через диагностическую систему доступны следующие сервисные функции системы интегрального активного рулевого управления:
- проверка действия HSR (проверка угла поворота колес)
- ввод в эксплуатацию датчика положения двигателя HSR
- измерение параметров ходовой части заднего моста
Путь: Сервисные функции > Ходовая часть > Система регулировки угла бокового увода задней оси
- Ввод в эксплуатацию, юстировка активного рулевого управления
Путь: Сервисные функции > Ходовая часть > Система активного рулевого управления
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.